Tech Elements
Радиоэлектроника и телекоммуникации
Краткое описание принципа действия ЛЧМ-дальномера
В любых радиолокационных системах измерение дальности основано на измерении (прямом или косвенном) времени запаздывания между излучением зондирующего сигнала и приходом отраженного от цели сигнала.
При использовании частотной модуляции наиболее приемлемым по схемотехническим соображениям и обеспечению минимальной погрешности измерения дальности считается использование линейной частотной модуляции (ЛЧМ) зондирующего сигнала. Принцип работы ЛЧМ-дальномера, работающего на одну приемо-передающую антенну, иллюстрируется упрощенной схемой, приведенной на рис.1.
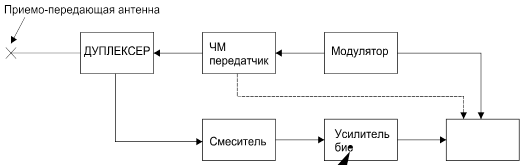
Рисунок 1. Упрощенная схема ЛЧМ-дальномера
Формирование зондирующего сигнала дальномера осуществляется в ЧМ-передатчике. Модулятор обеспечивает управление несущей частотой передатчика и представляет собой генератор линейно-изменяющегося напряжения (ГЛИН).
Зондирующий сигнал от передатчика через дуплексер (устройство, обеспечивающее одновременную работу передатчика и приемника) подается в антенну и излучается в направлении цели. Одновременно часть сигнала передатчика через дуплексер поступает на смеситель.
Отраженный от цели сигнал принимается антенной и через дуплексер подается на смеситель. В смесителе осуществляется преобразование частот зондирующего и принимаемого сигналов. В результате запаздывания в тракте распространения частоты зондирующего и принимаемого сигнала приобретают сдвиг на частоту биений, которая выделяется на выходе смесителя. При стабильных частоте модуляции и величине девиации частоты передатчика (разность частот передатчика в начале и в конце периода модуляции) частота биений пропорциональна времени запаздывания сигнала и, соответственно, измеряемой дальности.
Выходной сигнал смесителя усиливается усилителем биений и подается на измеритель, который осуществляет измерение частоты биений (или полного набега фазы сигнала биений) за период модуляции с учетом значений периода модуляции и девиации частоты.
Связь между указанными параметрами для ЛЧМ-дальномера с односторонней модуляцией ЛИН определяется выражением:
![]() , (1)
, (1)
где fб - частота биений;
Df - девиация частоты передатчика;
ТМ - период модуляции;
tз - время запаздывания сигнала.
С учетом известной зависимости между дальностью до цели и временем запаздывания
![]() , (2)
, (2)
где ![]() - дальность до цели;
- дальность до цели;
с - скорость света;
из (1) и (2) получим
![]() (3)
(3)
Принимая во внимание, что величина 2pfбТМ представляет собой значение полного набега фазы сигнала биений, из (3) следует, что для получения измеренного значения дальности достаточно измерить полный набег фазы сигнала биений при обеспечении высокой стабильности девиации частоты. Отсюда следуют 2 основных источника погрешности измерения дальности: погрешность измерения набега фазы и нестабильность (или неточность установки при изготовлении) девиации частоты.
Сложность заключается в том, что за период модуляции сигнал биений может содержать нецелое число периодов сигнала биений, и здесь имеют место дополнительные факторы, влияющие на погрешность, несмотря на использование специальных методов измерений.
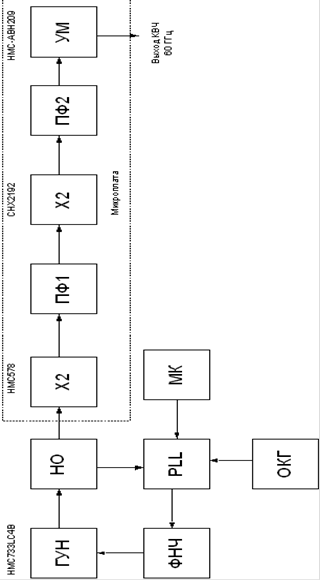
Структурная схема генератора калибровочного
Другие стьтьи в тему
Разработка предложений по созданию усовершенствованного варианта металлодетектора
В современном мире остро стоит проблема защиты человека от
террористической угрозы. Известно, что одним из средств контроля проноса оружия
и запрещенных предметов в места массового скопления людей и на охраняемые
объекты являются металлодетекторы. Металлодетекторами (metal detector до ...
Разработка системы автоматического регулирования
автоматический регулирование частотный
Для
осуществления автоматического управления техническим процессом создается
система, состоящая из управляемого объекта и связанного с ним управляющего
устройства. Как и всякое техническое сооружение, система должна обладать
констр ...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации