Tech Elements
Радиоэлектроника и телекоммуникации
Расчет рабочей нагрузки
При расчете нагрузки вводят упрощающую модель, показанную на рисунке 2.3. В этой модели нагрузка заменена эквивалентным вращающимся маховиком, который отделен от приводного двигателя приводным редуктором.
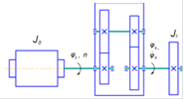
Рисунок 2.3 - Расчетная модель привода
Со стороны нагрузки в этой модели следует найти динамический момент нагрузки Mдин и статический момент нагрузки Мст.
Динамический момент нагрузки может быть найден по следующей формуле
![]() (2.1)
(2.1)
где ![]() - момент инерции нагрузки;
- момент инерции нагрузки;
![]() - максимальное ускорение вращения вала нагрузки.
- максимальное ускорение вращения вала нагрузки.
Момент инерции для зубчато-реечной передачи определяется так
 (2.2)
(2.2)
Подставляя в (2.2) границы интервала по массе из таблицы 1.1, получаем границы изменения момента инерции.
Переход от линейных перемещений рейки к вращательным движениям вала осуществляется по формулам
![]() (2.3)
(2.3)
![]() (2.4)
(2.4)
Величина статического момента в большей степени зависит от конструктивных особенностей. В механизме подъема и опускания данного робота предлагается использование пружинных уравновешивателей [1, с. 22]. Тогда статический момент определится по формуле
![]() (2.5)
(2.5)
Без вывода формула, получаемая из моментов (2.1) и (2.5), для выбора мощности двигателя выглядит так [1, с. 24]
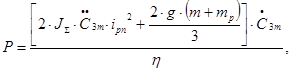 (2.6)
(2.6)
где g - ускорение свободного падения (![]() ).
).
Так как подстановка известных значений в формулы - задача тривиальная, то весь численный расчет выведен в приложение А 1. Здесь мы лишь ограничимся сводной таблицей.
В таблицу 2.2 выведены все интересующие нас значения из приложения по двум траекториям.
Таблица 2.2 - Сводная таблица по рабочей нагрузке
|
1-ая траектория |
2-ая траектория |
Общие* |
Мдин, Н∙м P, Вт ![]() ,
,
рад/с![]() ,
,
рад/с2Мдин, Н∙мP,
Вт![]() ,
,
рад/с![]() ,
,
|
рад/с2JΣ, кг∙м2Мст, Н∙м | |||||||||||
|
25,692 |
413 |
0,776 |
0,685 |
38,538 |
665 |
1,165 |
1,028 |
16,7 |
37,5 |
130,8 |
294,3 |
|
* интервалы изменения | |||||||||||
Другие стьтьи в тему
Расчет преобразователя напряжения
Первая проблема, с которой при конструировании любых устройств
сталкиваются и начинающие и опытные радиолюбители - это проблема
электропитания. При выборе и разработке источника питания (далее ИП) необходимо
учитывать ряд факторов, определяемых условиями эксплуатации, свойствами
нагр ...
Разработка предложений по созданию усовершенствованного варианта металлодетектора
В современном мире остро стоит проблема защиты человека от
террористической угрозы. Известно, что одним из средств контроля проноса оружия
и запрещенных предметов в места массового скопления людей и на охраняемые
объекты являются металлодетекторы. Металлодетекторами (metal detector до ...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации