Tech Elements
Радиоэлектроника и телекоммуникации
Математическая модель двигателя постоянного тока
Отметим, что предлагается использовать регулирование скорости вращения двигателя по цепи якоря. Для ДПТ в этом случае вводится линеаризованная модель, структурная схема которой представлена на рисунке 3.2.
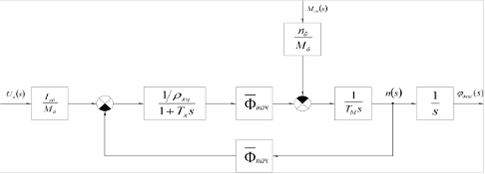
Рисунок 3.2 - Линеаризованная модель ДПТ
Здесь и далее под базовыми параметрами двигателя будем понимать номинальные значения.
Для расчета параметров модели воспользуемся таблицей 2.3 и 2.4. Обратное значение относительного сопротивления якорной цепи равно
![]() .
.
Интересующие нас отношения схемы 3.2 будут равны
![]() ,
,
![]()
Рабочее значение магнитного потока выбирается в промежутке ![]() , но в большинстве случаев достаточно задаться
, но в большинстве случаев достаточно задаться ![]() . Тогда
. Тогда ![]() .
.
Постоянная времени якорной цепи Tяц приведена в паспортных данных ДПТ (таблица 2.3). Статический момент Мст, действующий на вал двигателя со стороны редуктора и нагрузки, будет равен (пользуемся таблицей 2.2)
![]() .
.
Условимся, что этот статический момент действует при любом грузе для упрощения модели.
Последний оставшийся параметр - механическая постоянная двигателя ![]() - переменный и зависит от массы поднимаемого / опускаемого груза. Определим интервал, в котором данный параметр изменяется, воспользовавшись таблицами 2.2 и 2.3.
- переменный и зависит от массы поднимаемого / опускаемого груза. Определим интервал, в котором данный параметр изменяется, воспользовавшись таблицами 2.2 и 2.3.
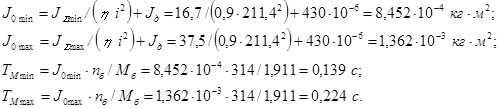
Таким образом, механическая постоянная двигателя изменяется в пределах
![]() . (3.1)
. (3.1)
Подставим рассчитанные параметры в структурную схему рисунка 3.2.
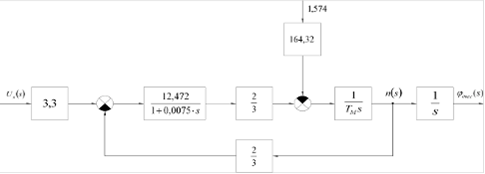
Рисунок 3.3 - Линеаризованная модель ДПТ с подставленными параметрами
Для дальнейшего синтеза нам понадобится передаточная функция модели двигателя, однако, очевидно, что модель двигателя обладает переменной структурой. Тем не менее, колебания параметра ![]() происходит в не очень широких пределах, поэтому нам достаточно рассмотреть два краевых случая: при максимальной массе груза и при минимальной.
происходит в не очень широких пределах, поэтому нам достаточно рассмотреть два краевых случая: при максимальной массе груза и при минимальной.
Если сворачивать структурную схему в общем виде, пока не обращая внимания на самый правый интегратор (см. рисунок 3.2), то передаточная функция представится в следующем виде
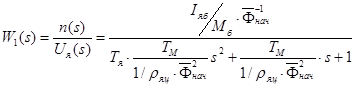 . (3.2)
. (3.2)
Подставив известные параметры, с учетом переменной структуры (3.1), мы получаем две передаточные функции двигателя
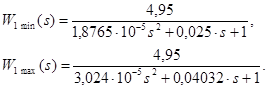 (3.3)
(3.3)
Убедимся, что передаточные функции представляют типовые колебательные звенья, для чего достаточно узнать значение коэффициента демпфирования.
![]()
Очевидно, что коэффициенты демпфирования больше единицы, а значит, двигатель не является колебательным звеном. В этом случае передаточная функция может быть представлена в виде произведения двух апериодических звеньев.
Свернув полиномы знаменателей (3.3) через теорему Виета получим
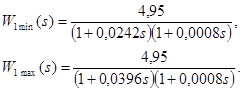 (3.4)
(3.4)
Теперь учтем самый правый интегратор в схеме рисунка 3.3 и получим окончательную передаточную функцию модели двигателя. С учетом (3.4) запишем
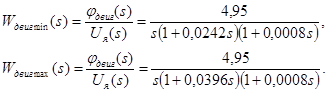 (3.5)
(3.5)
Другие стьтьи в тему
Проектирование цифровых устройств
1. Произвести синтез цифрового устройства
управления (ЦУУ) в базисах мультиплексоров, логических элементов Шеффера и
Пирса в соответствии с заданным вариантом (приложения №1 и №2).
2. Произвести схемотехническое моделирование
синтезированных схем ЦУУ с помощью программы Electronics Wor ...
Регулятор мощности
На
современном этапе научно-технического прогресса огромную роль играет развитие
электроники. Электронная промышленность определяет научно-технический и
экономический потенциал Республики Беларусь. В данную отрасль промышленности
входит множество объединений, заводов, конструкторских ...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации