Tech Elements
Радиоэлектроника и телекоммуникации
Обобщённая схема замещения растрового трансформаторного датчика угловых перемещений
На рисунке 2.1 приведена конструктивная схема растрового датчика линейных перемещений , в основе которого: 1-корпус, 2-статор, 3-ротор,
-контактная колодка, 5-измерительные обмотки, 6-подшибники.
Анализ конструктивной схемы позволил составить его обобщённую схему замещения, приведённую на рисунке 2.1.
Преобразователь состоит из подвижного ротора и неподвижного статора. Магнитный поток замыкается через участки магнитопровода с магнитными сопротивлениями ![]() и
и ![]() ротора и статора соответственно, рабочий зазор
ротора и статора соответственно, рабочий зазор ![]() , проводимость которого изменяется при вращении ротора, и магнитное сопротивление утечки через торцевые поверхности статора и ротора.
, проводимость которого изменяется при вращении ротора, и магнитное сопротивление утечки через торцевые поверхности статора и ротора.
![]() - магнитодвижущая сила обмотки возбуждения [1].
- магнитодвижущая сила обмотки возбуждения [1].
С помощью обобщённой схемы замещения возможен расчёт различных конструкций датчиков с наружным ротором, при этом требуется перейти к схеме замещения с сосредоточенными параметрами. С целью унификации растровых ДУП при их разработке в качестве ЧЭ для датчиков линейных перемещений использовалась конструкция, приведённая на рисунке 2.2. Схема замещения магнитной цепи в этом случае примет вид, изображённый на рисунке 2.3.
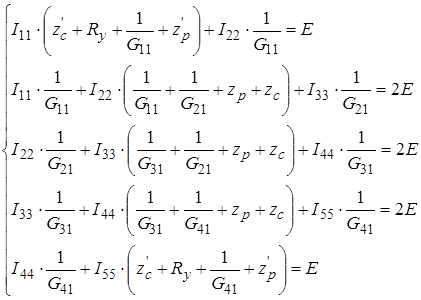
Для поиска связи между параметрами схемы и выходными характеристиками применяем метод контурных токов. Выбираем контуры и направление токов, как показано на рисунке 1.4. При расчёте полагаем, что в каждом контуре схемы течёт свой контурный ток. Для каждого контура составим уравнение по второму закону Кирхгофа. Тогда система уравнений имеет вид:
 (2.1)
(2.1)
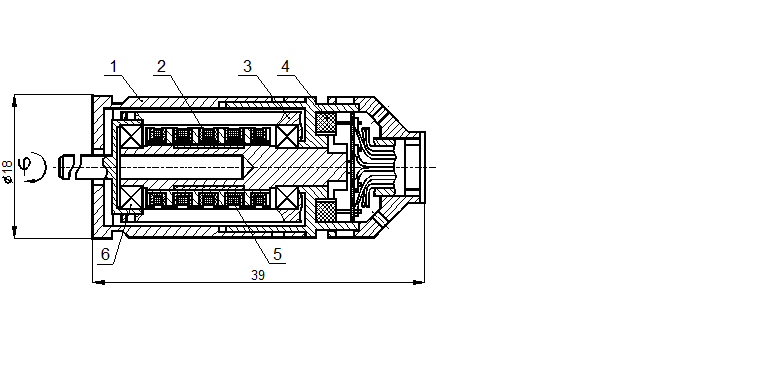
Рисунок 2.1 - Конструктивная схема растрового датчика угловых перемещений.
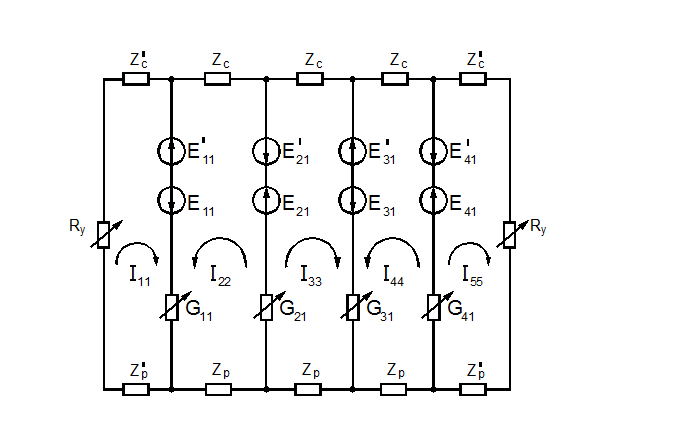
Рисунок 2.3 - Схема замещения магнитной цепи растрового ДУП.
Так как в схеме замещения ток в k-ой ветви символизирует магнитный поток в этой ветви ![]() ,
, ![]() , а ЭДС символизирует МДС -
, а ЭДС символизирует МДС - ![]() , то выходной сигнал можно представить для схемы замещения (рисунок 2.3) следующим образом:
, то выходной сигнал можно представить для схемы замещения (рисунок 2.3) следующим образом:
![]() , (2.2)
, (2.2)
где ![]() - число витков вторичной обмотки.
- число витков вторичной обмотки.
Продифференцируем обе части линейных уравнений (2.1). После умножения на ![]() , с учётом выражения (2.2) и
, с учётом выражения (2.2) и ![]() , получаем:
, получаем:
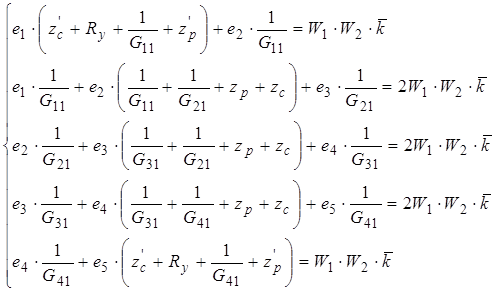 (2.3)
(2.3)
Запишем систему уравнений (2.3) в матричной форме:
![]() , (2.4)
, (2.4)
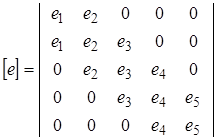
где [Z] - матрица сопротивлений:
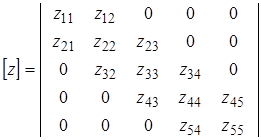 , (2.5)
, (2.5)
где 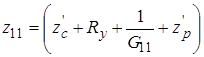 ;
;  ;
;
 ;
; 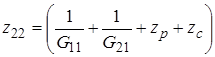 ;
;  ;
;


 ;
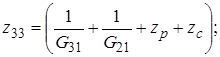
;  ;
;  ;
;
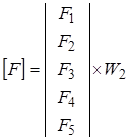
[е] - матрица выходных ЭДС [F] - матрица МДС
 ;
; 
Топология схемы и её рабочие режимы полностью определяются матрицами магнитных сопротивлений, МДС и магнитных потоков. Если определитель системы (2.5) ![]() [z]
[z]![]() , то система уравнений имеет единственное решение [28].
, то система уравнений имеет единственное решение [28].
Другие стьтьи в тему
Разработка стенда для исследования схемы синхронного RS-триггера
Одним
из ведущих направлений развития современной микроэлектроники элементной базы
являются большие интегральные микросхемы памяти, которые служат основой для
построения запоминающих устройств в аппаратуре различного назначения. Наиболее
широкое применение эти микросхемы нашли в ЭВМ, ...
Разработка проекта модернизации участка транспортной сети оператора связи на базе оборудования плотного волнового спектрального мультиплексирования
Принятые сокращения и условные
обозначения
Термин, сокращение
Описание
МССС
ПО
ПУ
ПУЭ
РС
У ...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации