Tech Elements
Радиоэлектроника и телекоммуникации
Общие сведения и классификация систем функционального дополнения
Основу дифференциальной подсистемы составляют наземные контрольно-корректирующие станции (ККС), координаты которых известны и определены с большой точностью. Как правило, под координатами ККС в данном случае подразумевают координаты фазового центра приемной антенны. Путем сравнения измеренных значений псевдодальностей до спутников с достоверными значениями, вычисленными на основе полученной от главной станции информации об орбитах НКА, вычисляются поправки к псевдодальностям. Полученные значения передаются потребителям по специально выделенным линиям передачи данных. Потребитель должен иметь соответствующий приемник, оснащенный модулем для приема радиосигналов ККС.
Принято различать широкозонные, региональные, локальные дифференциальные подсистемы и псевдоспутники (рис.5).
Рис.5. Классификация наземных систем функционального дополнения
Общие положения систем функционального дополнения
Основой широкозонной подсистемы (ШДПС) является сеть специальных широкозонных ККС, информация о поправках с которых передается на главную станцию. После дополнительной проверки на главной станции вырабатывается комплекс общих поправок и целостности. Выработанные сигналы передаются, как правило, на геостационарные спутники, с которых транслируются на приемники потребителей. Применение геостационарных спутников позволяет обеспечить радиус рабочей зоны порядка 5000…6000 км. Достаточно часто ККС, входящие в ШДПС, обеспечивают и локальный сервис с применением дополнительных каналов передачи данных.
К настоящему времени наиболее широкую известность получили проекты ШДПС или SBAS, использующих геостационарные космические аппараты в качестве средств передачи сигналов контроля целостности и дифференциальных поправок. Такими системами являются американская WAAS, европейская EGNOS и японская MSAS (рис.6).

Рис.6. Зоны покрытия систем WAAS, EGNOS и MSAS

Рис.7. ШДПС WAAS
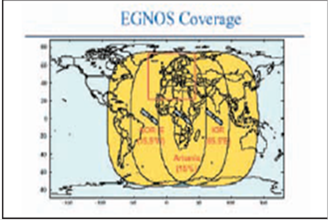
Рис.8. ШДПС EGNOS

Рис.9. ШДПС MSAS.
Региональные дифференциальные системы (РДПС) служат для навигационного обеспечения отдельных регионов от 400 до 2000 и предназначены для навигационного обеспечения отдельных регионов моря/океана или континента. В состав РПДС входят одна или несколько ККС, а также аппаратура контроля целостности и средства передачи данных потребителю. Эти данные вырабатываются либо на главной станции, либо непосредственно на ККС. Примерами РДПС являются сстемы Starfix (рис.10) и SkyFix (рис.11) . Эти системы используют для передачи информации каналы спутников INMARSAT.
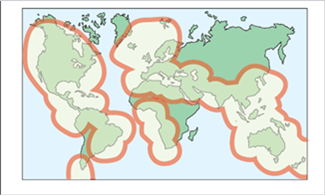
Рис.10. РДПС StarFix
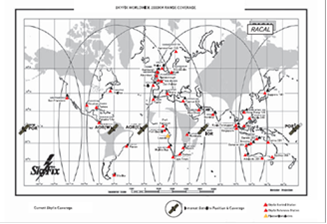
Рис.11. РДПС SkyFix
Локальные дифференциальные подсистемы (ЛДПС) функционируют при дальности до потребителя в диапазоне 50…200 км и обычно имеют в своем составе одну ККС, аппаратуру управления и контроля целостности и средства передачи данных. В качестве аппаратуры передачи данных ЛПДС часто применяют имеющиеся радиомаяки.
ЛДПС довольно разнообразны. Морские системы для передачи информации используют средневолновые радиомаяки дальностью до 200 км. В авиации в районе аэродромов используются подсистемы с общим названием GBAS (Ground Based Augmentation System) - Наземные системы функционального дополнения (рис.12).
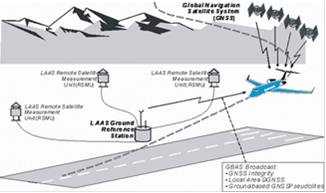
Рис.12. ЛДПС GBAS
Псевдоспутники (псевдолиты)
Возможна разновидность дифференциальной подсистемы, когда передаваемые потребителю сигналы с поправками и другой информацией привязаны к местной шкале времени. После учета поправок шкала времени потребителя также оказывается привязанной к местной шкале времени, следовательно, принятые потребителем сигналы дифференциальной подсистемы являются источником информации о взаимной дальности и скорости потребителя относительно дифференциальной станции.
Если дифференциальная станция излучает сигнал, аналогичный сигналу НКА, она называется псевдоспутником (псевдолитом). Наиболее очевидным и частым примером применения псевдоспутников является выведение самолетов на посадочную глиссаду. При неудачном расположении НКА наличие псевдоспутников позволяет снизить значение геометрического фактора в вертикальной плоскости в 6…8 раз и в горизонтальной плоскости в 3…4 раза.
Другие стьтьи в тему
Разработка и обеспечение надежности систем автоматического управления
К современной радиоэлектронной аппаратуре предъявляются многогранные
технические требования. Поэтому для реализации сложных систем автоматического
управления (САУ) необходимо применять десятки и сотни тысяч различных
элементов. Сложность аппаратуры отрицательно сказывается на её надёж ...
Разработка узкополосного частотно-модулированного приемника
Радиосистемы различного назначения, от простейших радиотелефонов до
компьютерных радиосетей, пользуются всё большим успехом у пользователей во всём
мире. После нескольких десятилетий развития теории и техники радиосистем
значительно выросли скорость и качество коммуникационных услуг п ...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации