Tech Elements
Радиоэлектроника и телекоммуникации
Выбор закона регулирования
Структурная схема разрабатываемой системы представлена на рис. 2.1.
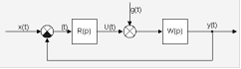
Рис.
На рис. 2.1 приняты обозначения:
![]()
![]() - передаточная функция регулятора;
- передаточная функция регулятора;
![]()
![]() - передаточная функция объекта управления;
- передаточная функция объекта управления;
![]()
![]() - задающее воздействие;
- задающее воздействие;
![]()
![]() - ошибка (отклонение);
- ошибка (отклонение);
![]()
![]() - управляющее воздействие;
- управляющее воздействие;
![]()
![]() - возмущающее воздействие;
- возмущающее воздействие;
![]()
![]() - рабочий параметр.
- рабочий параметр.
В разрабатываемой системе реализован принцип замкнутого управления (управления по ошибке или по отклонению). Суть этого принципа состоит в том, что на вход регулятора поступает сигнал ошибки ![]()
![]() , который представляет собой разность задающего воздействия
, который представляет собой разность задающего воздействия ![]()
![]() и рабочего параметра
и рабочего параметра ![]()
![]() . В зависимости от ошибки регулятор вырабатывает управляющий сигнал
. В зависимости от ошибки регулятор вырабатывает управляющий сигнал ![]()
![]() , который поступает на исполнительные элементы объекта управления. Для выбора наилучшего закона регулирования необходимо исследовать работу системы при различных регуляторах. Проведем исследование САР с помощью приложения МВТУ 3.6 в соответствии со схемой приведенной на рис. 2.2.
, который поступает на исполнительные элементы объекта управления. Для выбора наилучшего закона регулирования необходимо исследовать работу системы при различных регуляторах. Проведем исследование САР с помощью приложения МВТУ 3.6 в соответствии со схемой приведенной на рис. 2.2.

Рис. 2.2. Схема исследования САР
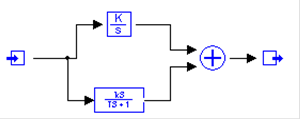
Рис. 2.3. Схема макроблока
В результате исследования было получено, что оптимальным является ИД-регулятор.
Передаточная функция ИД регулятора имеет вид:
![]()
Определим передаточных функций системы с ИД-регулятором.
а) Передаточная функция САР по каналу управления
Передаточная функция системы по каналу управления - ![]()
![]() - это отношение изображения рабочего параметра к изображению задающего воздействия:
- это отношение изображения рабочего параметра к изображению задающего воздействия:
![]()
получим выражение:

б) Передаточная функция САР по каналу возмущения
Передаточная функция системы по каналу возмущения - ![]()
![]() - это отношение изображения рабочего параметра к изображению возмущающего воздействия:
- это отношение изображения рабочего параметра к изображению возмущающего воздействия:
![]()
получим выражение:

в) Передаточная функция САР по ошибке
Передаточная функция системы по ошибке - ![]()
![]() - это отношение изображения ошибки к изображению задающего воздействия:
- это отношение изображения ошибки к изображению задающего воздействия:
Другие стьтьи в тему
Разработка рекомендаций по повышению безопасности мобильных платежей
мобильный телефон платеж
безопасность
Оплата за товары и услуги с помощью мобильных устройств уже перестала
быть экзотикой, а мобильные платежи, являющиеся ключевой составляющей мобильных
финансовых услуг, набирают обороты во всем мире. Но вместе с тем растет риск
быть обманутыми злоу ...
Распределитель импульсов
Разработать
распределитель импульсов, формирующий на выходах Z1
и Z2
их N входных импульсов
(от ГТИ) указанные последовательности. Реализация на основе сдвигового
регистра, двоичного счетчика.
Последовательности
выбираются из 4х вариантов. Были выбраны 1 и 3 режим:
Z1 ...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации