Tech Elements
Радиоэлектроника и телекоммуникации
Разработка принципиальной схемы ИД-регулятора
ИД - регулятор можно реализовать параллельным соединением И и Д - регуляторов. Интегральный регулятор представлен на рисунке 7.1.
Коэффициент усиления такой схемы определяется по формуле:
![]()
Рассчитаем необходимые сопротивления.

Рис. 7.2. Принципиальная схема И-регулятора
В нашем случае, ![]()
![]() . Тогда, приняв
. Тогда, приняв ![]()
![]() , получаем:
, получаем:
![]()
Рассмотрим дифференциальный регулятор. Д - регулятор имеет следующую передаточную функцию:
![]()
Такой передаточной функции соответствует схема представленная на рис. 7.2.
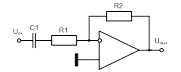
Рис. 7.2. Принципиальная схема Д - регулятора
Так как:
![]()
Для регулятора примем:
![]()
тогда для
![]()
![]() ,
, ![]()
![]()
получаем:
![]()
Для соединения интегрального и дифференциального регуляторов необходимо использовать сумматор:
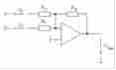
Рис. 7.3. Принципиальная схема сумматора
Для данной схемы:
![]()
Необходимо, чтобы ![]()
![]() , это значит, что
, это значит, что ![]()
![]() . Примем
. Примем ![]()
![]()
Для создания устройств регуляторов и сумматора используем низкопотребляющий двухканальный операционный усилитель LM358 (КР1040УД1) с параметрами:
![]()
Заключение
В данной курсовой работе была спроектирована система автоматического регулирования. Был подобран регулятор к заданному объекту управления и найдены его оптимальные параметры, обеспечивающие наименьшее время регулирования. Была проведена оценка устойчивости и качества САР. Основные результаты, полученные в ходе выполнения курсовой работы, представлены в табл. 1.
Таблица 1. Результаты курсовой работы
|
Передаточная функция объекта управления |
|
|
Тип регулятора |
Интегрально-дифференциальный (ИД) |
|
Передаточная функция регулятора |
|
|
Запас устойчивости по амплитуде |
|
|
Запас устойчивости по фазе |
|
|
Время нарастания |
|
|
Время регулирования |
|
|
Перерегулирование |
|
|
Коэффициент астатизма |
|
|
Линейная интегральная оценка |
|
|
Квадратичная интегральная оценка |
|
Другие стьтьи в тему
Разработка специализированного цифрового функционального узла
Разработать
генератор чисел, формирующий при поступлении на его вход каждых N
входных импульсов синхронизации, в зависимости от задаваемого управляющим
сигналом режима, на выходах Z1
и Z2 одну
из двух последовательностей значений сигналов, приведенных в табл. 1.
Таблица
1.
...
Распределительная сеть системы кабельного телевидения
Телевидение
- величайшее явление XX века, которое объединило в себе самые передовые
достижения научно-технической мысли, культуры, журналистики, искусства,
экономики. Став одним из компонентов системы средств массовых коммуникаций,
телевидение не завершило ее формирование, но повлекл ...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации