Tech Elements
Радиоэлектроника и телекоммуникации
Вибрационные датчики
На рис. 1 показаны основные элементы устройства для измерения вибраций - датчика вибраций. В простейшей схеме датчик вибраций можно представить в виде сейсмической массы m , прикреплённой пружинами внутри корпуса. Корпус установлен на конструкции, вибрации y которой должны быть измерены.
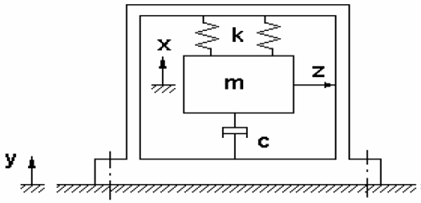
Рис. 1. Принципиальная схема датчика вибраций. х -координата массы; у - координата поверхности, на которой закреплён датчик; z - сигнал с датчика; m -масса; k - жесткость подвеса; c - демпфирование в датчике
Очевидно, что сейсмическая масса внутри корпуса совершает относительное движение x- y.
Чтобы понять принцип работы датчика, рассмотрим уравнение движения сейсмической массы m:
![]()
![]() (1)
(1)
Обозначим относительное перемещение массы и корпуса
![]()
![]() (2)
(2)
Объединяя уравнения (1) и (2), получаем
![]()
![]() (3)
(3)
В предположении гармонического движения конструкции, на которой установлен корпус
![]()
![]() (4)
(4)
получим
![]()
![]() (5)
(5)
Решение уравнения (5) ищется в виде
![]()
![]() (6)
(6)
Проведя соответствующие подстановки, получим выражение для амплитуды относительного смещения Z:
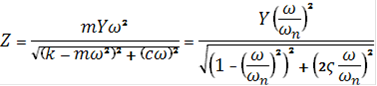 (7)
(7)
и его фазы:
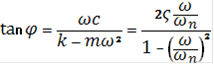 (8)
(8)
В выражениях (7) и (8) V - относительный коэффициент демпфирования, wn - частота собственных колебаний. На рис.2 представлена графическая интерпретация решения.
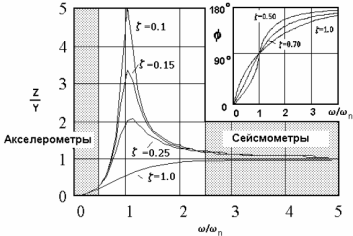
Рис.2. Амплитудно-частотная характеристика устройства для измерения вибраций.
Полученные уравнения являются общими для всех типов вибрационных датчиков. Сам же тип датчика определяется соотношениями его резонансной частоты и частотным диапазоном измеряемого сигнала. В соответствии с этим можно выделить два типа датчиков - сейсмометры и акселерометры.
Сейсмометр имеет очень низкую частоту собственных колебаний. Поэтому область частот, для которых такой датчик используется, характеризуется большой величиной w / wn. Если w / wn ®¥, то относительное перемещение становится равным Y, или Z / Y = 1. Поэтому масса m находится в стационарном положении, в то время как корпус датчика движется вместе с колеблющимся телом.
Одним из основных недостатков сейсмометра является его большой размер. Так как |Z| = |Y| , то относительное движение сейсмической массы должно быть того же порядка, что и вибрации, которые должны быть измерены.
Относительное движение обычно в сейсмометрах преобразуется в электрическое напряжение. В корпусе сейсмометра помещается обмотка, через которую и будет проходить сейсмическая масса, выполненная из магнитного материала. Так как напряжение, возникающее в обмотке, пропорционально скорости изменения магнитного потока, то напряжение на выходе датчика пропорционально скорости колеблющегося тела. Обычно датчики такого типа, применяемые в двигателестроении имеют собственную частоту в диапазоне до 30 Гц и полезный частотный диапазон до 500 Гц. Чувствительность датчиков составляет около 100 мВ с/см, максимальное перемещение около 1 мм.
Акселерометры имеют высокую частоту собственных колебаний. Частотный диапазон, в котором они обычно работают, определяется величиной w / wn, которая лежит в пределах от 0 до 0,4. Из уравнения (7) видно, что при |w / wn| ®0, перемещение становится равным
![]()
![]() (9)
(9)
Другие стьтьи в тему
Разработка рекомендаций по повышению безопасности мобильных платежей
мобильный телефон платеж
безопасность
Оплата за товары и услуги с помощью мобильных устройств уже перестала
быть экзотикой, а мобильные платежи, являющиеся ключевой составляющей мобильных
финансовых услуг, набирают обороты во всем мире. Но вместе с тем растет риск
быть обманутыми злоу ...
Разработка газолазерной головки для резки полимерных композиционных материалов
Полимерные
композиционные материалы: основные типы
Композиционные
материалы (композиты) [1] - многокомпонентные материалы, состоящие, как
правило, из пластичной основы (матрицы), армированной наполнителями,
обладающими высокой прочностью, жесткостью и т.д. Сочетание разнородных в ...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации