Tech Elements
Радиоэлектроника и телекоммуникации
Выбор сопротивлений выходного делителя R4, R7
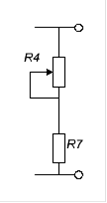
Iд=0,5 А
Iд(R4+R7)=Ud
R7=10 Ом (KNP-200 2 Вт, 10 Ом, 5%)
Ud=15 - 20 В, откуда
R4=20 - 30 Ом (3314J-1)
Другие стьтьи в тему
Разработка приемника системы персонального радиовызова
Радиоприемным устройством называют систему узлов
и блоков, с помощью которых производятся такие операции, как преобразование
электромагнитного поля сигнала в электрический сигнал; выделение полезных
радиосигналов из совокупности других (мешающих) сигналов и помех, действующих на
выхо ...
Разработка технологической инструкции по обслуживанию и ремонту импульсной паяльной системы
Прохождение
производственной практики позволяет практиканту закрепить теоретические знания,
опробовав их на деле. Главной особенностью данной практики является то, что
практикант имеет хорошую возможность для усовершенствования собственных навыков
владения рабочим инструментом, а так ...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации