Tech Elements
Радиоэлектроника и телекоммуникации
Проектирование системы регулирования
Итак, имея необходимые силовые компоненты электропривода, синтезируем систему регулирования. На рисунке 3.1 изображена функциональная схема привода.
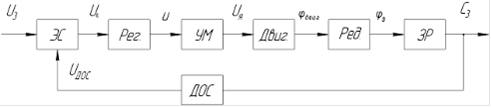
Рисунок 3.1 - Функциональная схема привода
На схеме рисунка 3.1 приведены следующие условные обозначения: ЭС - элемент сравнения; Рег. - регулятор; УМ - усилитель мощности; Двиг. - приводной двигатель типа ДПТ; Ред. - редуктор; ЗР - зубчато-реечная передача; ДОС - датчик обратной связи.
Очевидно, что для числового расчета регулятора необходимо ввести математические модели отдельных компонент схемы: модель ДПТ вместе со всеми механическими передачами, в том числе и зубчато-реечной, и датчика линейного перемещения.
Другие стьтьи в тему
Расчет и исследование динамики непрерывных и цифровых систем регулирования
Управление
- это процесс формирования и реализации управляющих воздействий, направленных
на достижение некоторой цели. Такой целью может быть поддержание некоторой
физической величины на заданном уровне, изменение некоторого параметра по
определенному алгоритму, получение желаемого в ...
Протоколы сигнализации на мобильных сетях
Сотовая связь - весьма заметное явление в технике связи. В настоящее
время информационный сектор является самым динамичным в мировой экономике. В
свою очередь, в информационном секторе наиболее быстро развивается сотовая
связь. Связь - одна из основных составляющих инфраструктуры, она ...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации