Tech Elements
Радиоэлектроника и телекоммуникации
Расчет и исследование динамики непрерывных и цифровых систем регулирования
Управление - это процесс формирования и реализации управляющих воздействий, направленных на достижение некоторой цели. Такой целью может быть поддержание некоторой физической величины на заданном уровне, изменение некоторого параметра по определенному алгоритму, получение желаемого вида переходных процессов и т.д.
Системой автоматического управления называется совокупность объекта управления и управляющего устройства, взаимодействие которых обеспечивает процесс управления без участия человека. Частным случаем системы автоматического управления является система автоматического регулирования, в которой в качестве управляющего устройства используется регулятор.
Пример автоматической системы регулирования приведен на рис.1:
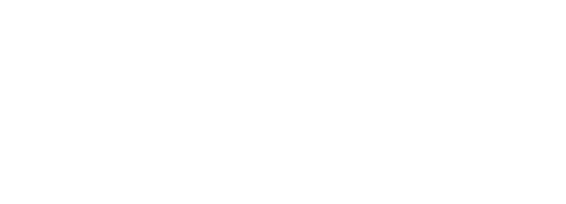
Рис.1. Структурная схема автоматической системы регулирования.
Регулируемой величиной y(t) является параметр, характеризующий работу объекта и который необходимо изменять в соответствии с целью управления (например, поддерживать на заданном уровне).
Регулирующее воздействие u(t) представляет собой изменение материальных или энергетических потоков (расходы теплоносителей, хладагентов и т.д.), с помощью которых регулятор влияет на состояние объекта управления для достижения цели управления.
Входным сигналом системы является задающее воздействие (задание) y0(t), соответствующее желаемому значению регулируемого параметра.
Разность между заданным и измеренным значением регулируемой величины называется рассогласованием ε(t):
![]()
![]()
Принцип работы замкнутой системы автоматического регулирования следующий. Текущее значение регулируемой величины измеряется датчиком. Сигнал с выхода датчика подается в регулятор, где сравнивается с заданным значением. При наличии разности (сигнала рассогласования) регулятор вырабатывает регулирующее воздействие, направленное на уменьшение сигнала рассогласования.
В качестве примера рассмотрим систему автоматического регулирования температуры технологического потока на выходе из теплообменного аппарата (рис. 2).
Текущее значение температуры t измеряется датчиком 1. Сигнал с выхода датчика, соответствующий измеренному значению температуры tизм, подается в управляющее устройство (регулятор) 2, где сравнивается с заданным значением температуры tзд. При наличии разности температур управляющее устройство вырабатывает управляющее (регулирующее) воздействие (изменение расхода греющего пара Fп), направленное на уменьшение сигнала рассогласования. Это воздействие стремится устранить отклонение независимо от причин, вызвавших это отклонение, будь то возмущающее воздействие, изменение свойств систему управления или несоответствие между рассчитанным и фактическим управляющим воздействием.
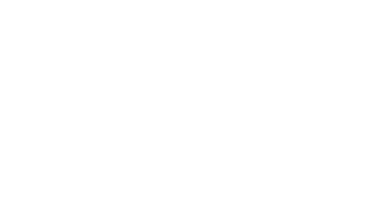
Рис. 2. Пример регулирования температуры в теплообменнике.
- датчик температуры; 2 - управляющее устройство; 3 - исполнительное устройство.
- Расчет настроек регулятора методом расширенных характеристик
- Расчет комбинированной системы автоматического управления
- Цифровые системы автоматического регулирования
- Расчет настроек регулятора методом расширенных характеристик
- Расчет комбинированной системы автоматического регулирования
- Расчет цифровой АСР
Другие стьтьи в тему
Расчет и моделирование усилительного каскада на биполярном транзисторе
Цель работы: расчёт и компьютерное моделирование
усилителя на примере усилительного каскада на биполярном транзисторе в схеме
включения с общим эмиттером, получение навыков в выборе параметров,
соответствующих максимальному использованию транзистора, а также приобретение
навыков комп ...
Разработка термометра на АЦП К572ПВ5 с выводом на жидкокристаллический индикатор
Измерители температуры (термометры) всегда широко использовались в
деятельности человека: как в научных, так и в бытовых целях. Первоначально
использовались физические свойства тел и жидкостей (спирт, ртуть). Но в
настоящее время широко применяются и электронные термометры, которые
п ...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации