Tech Elements
Радиоэлектроника и телекоммуникации
Расчет комбинированной системы автоматического регулирования
настройка регулятор цифровой автоматический
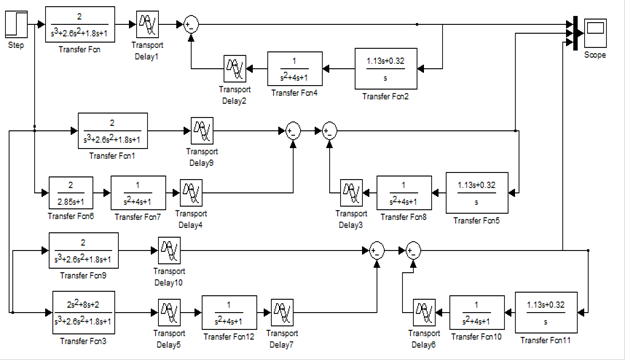
Рассмотрим случай когда выход компенсатора подключен ко входу объекта.
![]()
![]()
Для того, чтобы перейти от данной передаточной функции к передаточной функции вида
![]()
необходимо найти k и T. Для этого строим годограф.
[a,b]=pade(7,2)=tf(a,b)
[c,d]=pade(3,2)=tf(c,d)
Wov1=tf([2],[1,2.6,1.8,1])=tf([1],[1,4,1])=z1*Wov1=z2*Wop1=Wov/Wop
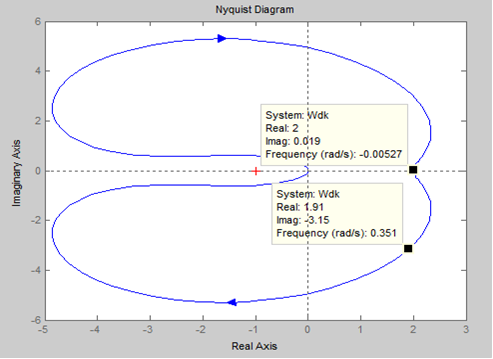
nyquist(Wdk)
По годографу мы можем определить:
k=2, ω=0,35 рад/сек.
Чтобы найти Т необходимо решить уравнение:
![]()
![]()
Возьмем φ=-450.
Тогда
![]() .
.
Значит, передаточная функция компенсатора имеет вид:
![]()
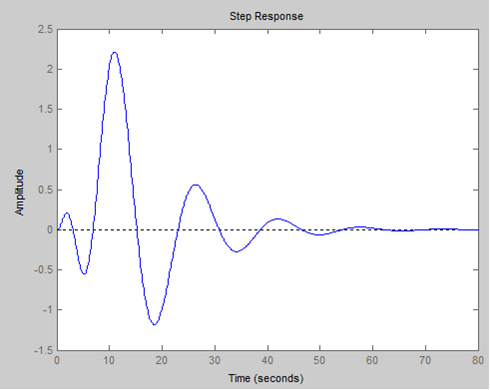
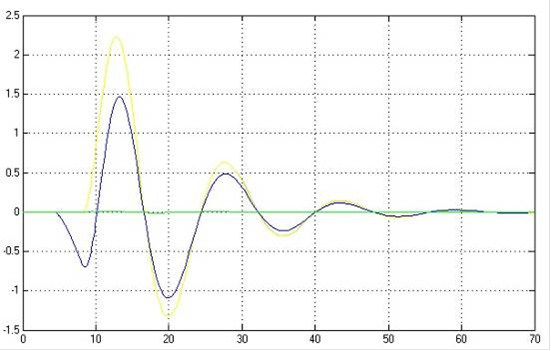
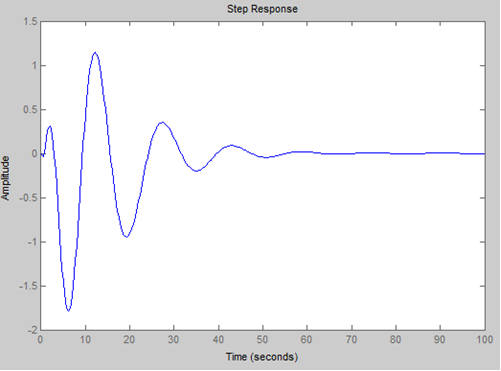
Построим переходные процессы.
wpi=tf([1.13,0.32],[1,0])
wraz=Wop*wpi=feedback(1,wraz)=Wov*wz(w12)
wdk1=tf([2],[2.85,1])=Wov-wdk1*Wop
step(W5)
W10=W5*wz(W10)
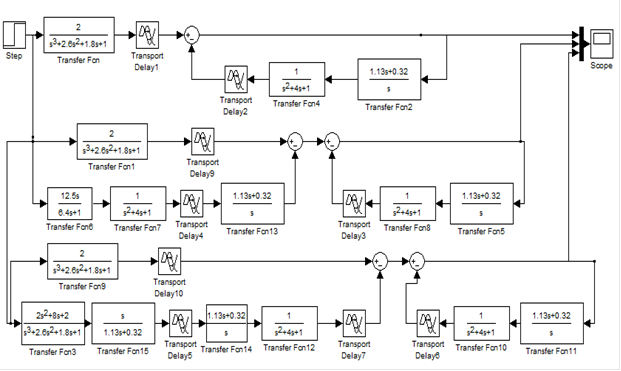
Схемы регулирования обладает следующими особенностями: наличием двух каналов воздействия на выходную координату объекта и использованием двух контуров регулирования - замкнутого (через регулятор) и разомкнутого (через компенсатор). Корректирующий импульс от компенсатора поступает на вход регулятора
2) Рассмотрим случай когда выход компенсатора подключен ко входу регулятора.
![]()
![]()
Для того, чтобы перейти от данной передаточной функции к передаточной функции вида
![]()
необходимо найти k и T. Для этого строим годограф.
Wdk=Wov/(Wop*wpi)
nyquist(Wdk)
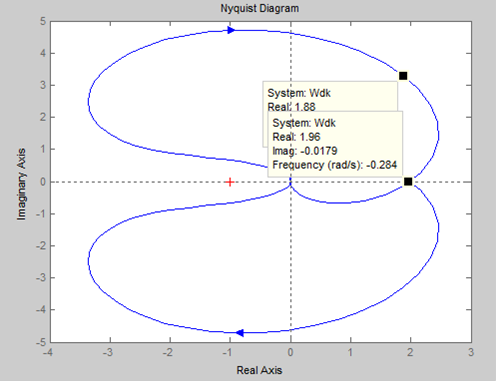
По годографу мы можем сразу определить:
k/Т=1,96
ω=0,156 рад/сек.
Π/2-arctgTw= Π/2
,156 T=1
T=6,4
К=12,5
Значит, передаточная функция компенсатора имеет вид:
![]()
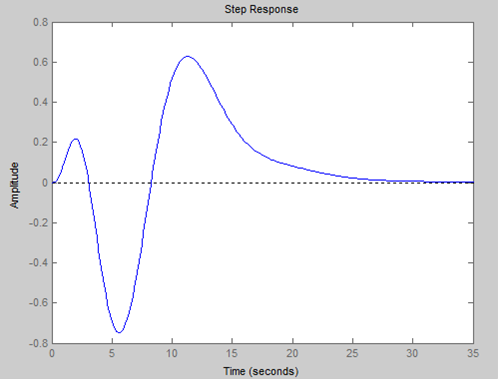
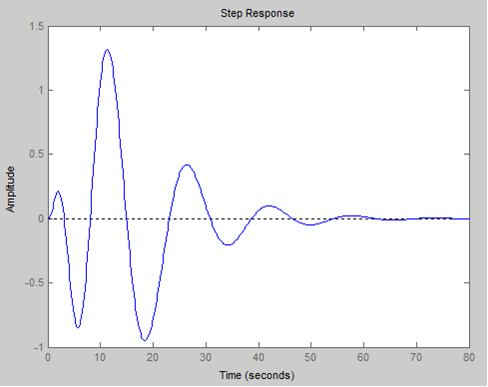
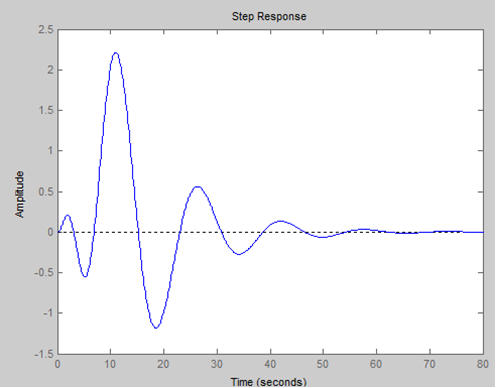
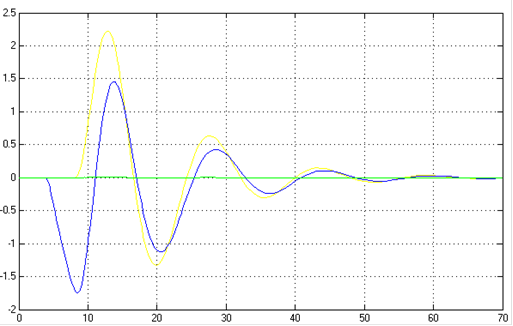
Построим переходные процессы.
wraz=Wop*wpi
wz=feedback(1,wraz)=Wov*wz
step(w12)
wdk1=tf([12.5, 0],[6.4,1])=Wov-wdk1*Wop*wpi=W5*wz(W10,100)
Другие стьтьи в тему
Расчет и конструирование схемы параллельного регистра на триггере CLD - типа
Одним из основных достижений микроэлектроники является создание на основе
фундаментальных и прикладных наук новой элементной базы - интегральных
микросхем. Развитие вопросов проектирования и совершенствование технологии
позволило в короткий срок создать высокоинтегрированные функциона ...
Расчет усилителя
Основные определения
Усилительным устройством (усилителем) называется устройство,
в нагрузку которого поступает усиленный по мощности входной сигнал. Эффект
усиления сигнала по мощности наблюдается только в том случае, когда имеется
источник энергии, за счет которого можно увеличи ...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации