Tech Elements
Радиоэлектроника и телекоммуникации
Расчет цифровой АСР
Получение цифрового П-регулятора с помощью встроенной функции MatLab
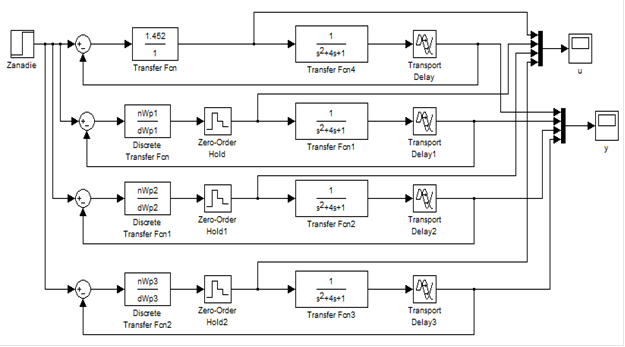
>> wp=tf([1.452],[1])
>> T1=1
>> Wp1=c2d(wp,T1,'tustin')
>> [nWp1,dWp1]=tfdata(Wp1,'v')
>> T2=4
>> Wp2=c2d(wp,T2,'tustin')
>> [nWp2,dWp2]=tfdata(Wp2,'v')
>> T3=8
>> Wp3=c2d(wp,T3,'tustin')
>> [nWp3,dWp3]=tfdata(Wp3,'v')
График изменения выходного сигнала:
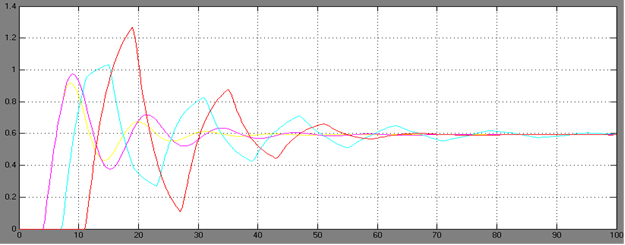
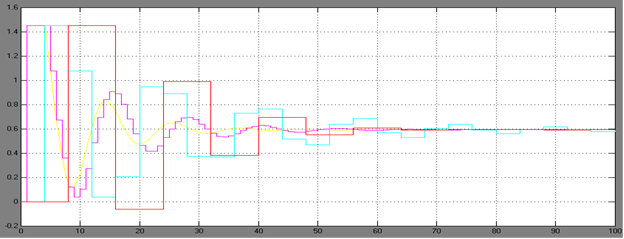
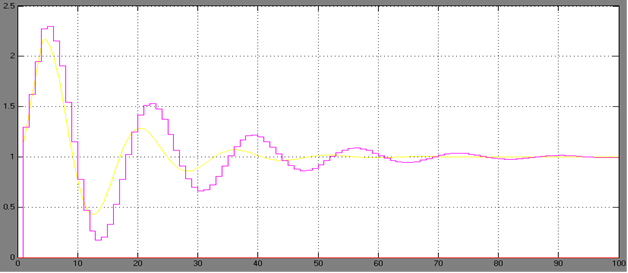
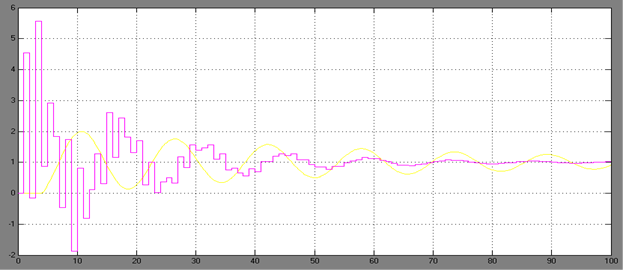
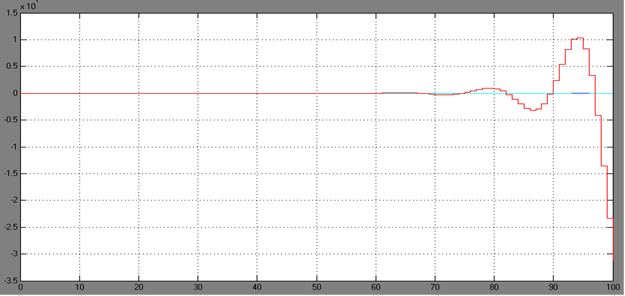
График изменения управляющего сигнала:
Получение цифрового ПИ-регулятора с помощью встроенной функции MatLab
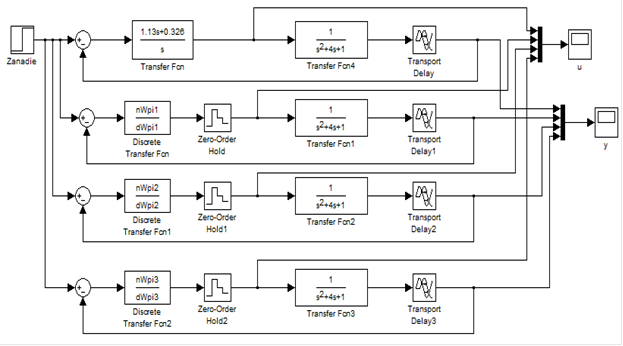
>> wpi=tf([1.13,0.326],[1,0])
>> T1=1
>> Wpi1=c2d(wpi,T1,'tustin')
>> [nWpi1,dWpi1]=tfdata(Wpi1,'v')
График изменения выходного сигнала:
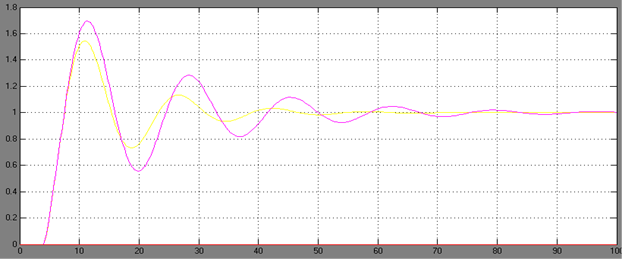
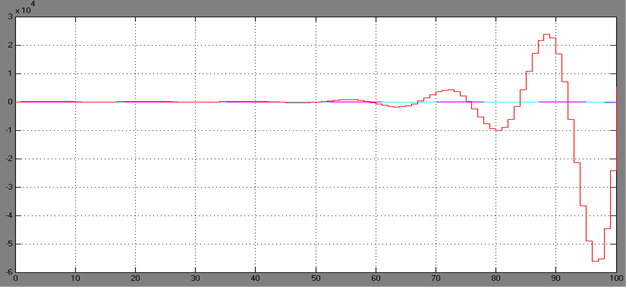
График изменения управляющего сигнала:
>> T2=2
>> Wpi2=c2d(wpi,T2,'tustin')
>> [nWpi2,dWpi2]=tfdata(Wpi2,'v')
>> T3=3
>> Wpi3=c2d(wpi,T3,'tustin')
>> [nWpi3,dWpi3]=tfdata(Wpi3,'v')
График изменения выходного сигнала:
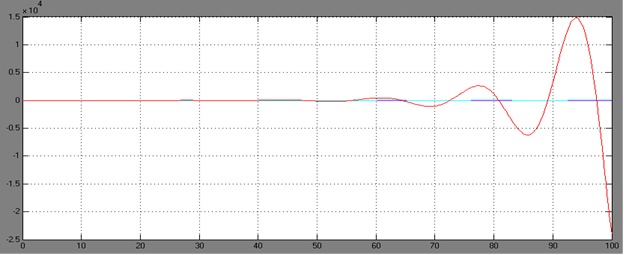
График изменения управляющего сигнала:
Получение цифрового ПИД-регулятора с помощью встроенной функции MatLab
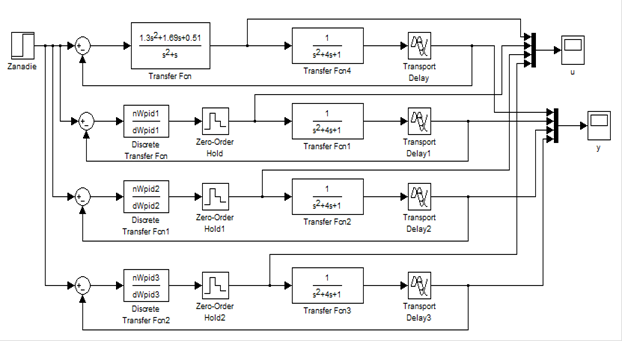
>> wpid=tf([1.3,1.69,0.51],[1,0])
>> T1=1
>> Wpid1=c2d(wpid,T1,'tustin')
>> [nWpid1,dWpid1]=tfdata(Wpid1,'v')
График изменения выходного сигнала:
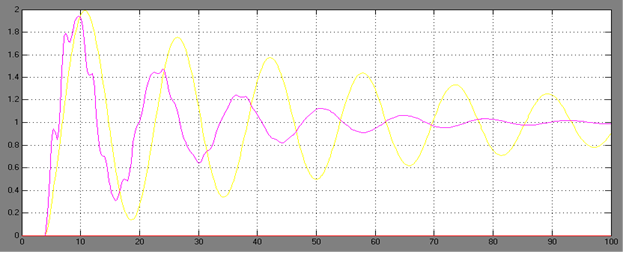
График изменения управляющего сигнала:
>> T2=2
>> Wpid2=c2d(wpid,T2,'tustin')
>> [nWpid2,dWpid2]=tfdata(Wpid2,'v')
>> T3=3
>> Wpid3=c2d(wpid,T3,'tustin')
>> [nWpid3,dWpid3]=tfdata(Wpid3,'v')
График изменения выходного сигнала:
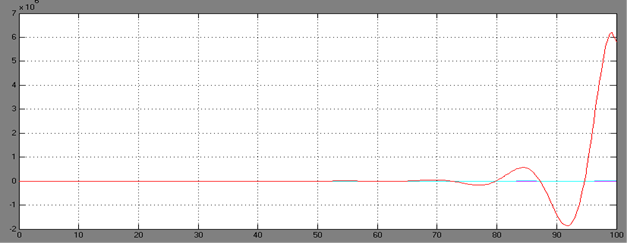
График изменения управляющего сигнала:
Заключение
Сравнивая характеристика регуляторов мы приходим к тому, что П-регулятор превосходит ПИ-регулятор по показателям динамической ошибки, степени затухания, кроме того П-регулятор наиболее прост конструктивно и дешев, однако он, в отличие от ПИ- и ПИД-регуляторов, имеет статическую ошибку. Таким образом, П-регулятор может использоваться в системах, не требующих точности регулирования.
Если же наличие статической ошибки недопустимо, то необходимо использовать ПИ- или ПИД-регуляторы. Наиболее оптимальным по показателям качества регулирования является ПИД-регулятор, но его следует выбирать в случае крайней необходимости, так как он наиболее сложный по конструкции и дороже в эксплуатации.
Комбинированная система с подключением динамического компенсатора на вход регулятора лучше отрабатывает возмущения.
Цифровая система отличается от аналоговой тем, что функции регулятора в ней выполняет цифровой компьютер. Линии заданного запаса устойчивости подобны линиям m = const для аналогового регулятора. При этом следует учитывать, что чем больше значение интервала квантования Т, тем меньше по сравнению с непрерывным алгоритмом область заданного запаса устойчивости и тем ниже динамическая точность АСР.
Другие стьтьи в тему
Расчет настроек типовых регуляторов в одноконтурной автоматической системе реагирования
автоматический
Цель
работы:
Определить
настроечные параметры (настройки) типового (ПИ, ПИД, ПД) регулятора в
одноконтурной АСР, обеспечивающие минимум интегрального квадратичного критерия
I0 при заданном ограничении запаса устойчивости m≥mзад.
Выбрать
промышленный регулят ...
Разработка устройства кодирования двухкаскадным способом
Эффективная
организация обмена информацией приобретает все большее значение, прежде всего
как условие успешной практической деятельности людей. Объем информации,
необходимой для нормального функционирования современного общества, растет в
соответствии с развитием производстве ...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации