Tech Elements
Радиоэлектроника и телекоммуникации
Проверка ошибок скорректированной системы
Имея все компоненты системы, определим теоретические значения ошибок. Отметим, что относительно главного входа система обладает астатизмом, поэтому постоянные входные воздействия отрабатываются с нулевой ошибкой. Однако, в системе есть возмущающее воздействие в виде сил трения, которое вносит свою долю в ошибку системы. Важно, чтобы эта доля была как можно меньше. Обычно достаточно, чтобы она не превышала ![]()
Теоретическое значение можно получить, если разрешить следующее выражение
![]() . (3.10)
. (3.10)
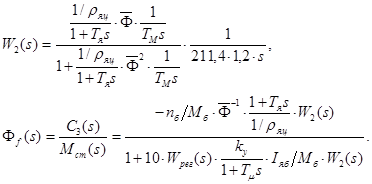
Передаточную функцию замкнутой системы по возмущению можно получить из рисунка 3.5. Перенося самый правый сумматор через два звена налево, можно получить следующую передаточную функцию (схема сворачивания показана на рисунке 3.6).
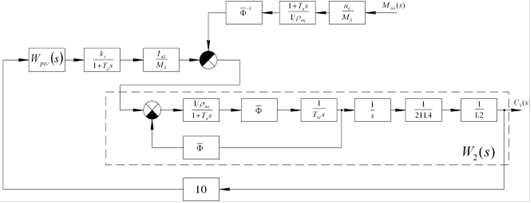
Рисунок 3.6 - Схема сворачивания для получения передаточной функции по возмущению
Разрешив предел и рассчитав (3.10) на Mathcad (Приложение А 5), получим следующие значения ошибки ![]()
Тогда, ![]()
Таким образом, доля ошибки возмущения не превышает порогового значения. Теоретическую динамическую ошибку системы можно получить, если составить частотную передаточную функцию по ошибке системы и определить ее значение на частоте контрольной точки, т.е.
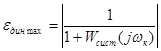 , (3.11)
, (3.11)
где ![]() - частотная передаточная функция разомкнутой системы, которая получается из (3.7).
- частотная передаточная функция разомкнутой системы, которая получается из (3.7).
Разрешая (3.11) в Mathcad (Приложение А 5), получим следующие значения ![]()
Не смотря на то, что полученная ошибка меньше регламента, следует помнить, что она не учитывает влияние сил сопротивления со стороны нагрузки, поэтому данное значение следует расценивать как минимальновозможное. Реальное положение дел можно узнать с помощью имитационного моделирования.
Другие стьтьи в тему
Разработка предложений по созданию усовершенствованного варианта металлодетектора
В современном мире остро стоит проблема защиты человека от
террористической угрозы. Известно, что одним из средств контроля проноса оружия
и запрещенных предметов в места массового скопления людей и на охраняемые
объекты являются металлодетекторы. Металлодетекторами (metal detector до ...
Разработка преобразователя углового перемещения
В системах автоматического контроля и управления широко применяются
различные преобразователи перемещений, значительный процент из которых
составляют преобразователи угловых перемещений.
От надёжности, точности, быстродействия преобразователей во многом
зависит технико - экономичес ...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации