Tech Elements
Радиоэлектроника и телекоммуникации
Определение параметров регулятора методом ЛАЧХ
Пусть надо обеспечить перерегулирование ![]() и время регулирования tрег = 0.5с.
и время регулирования tрег = 0.5с.
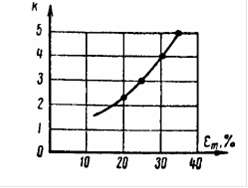
Рисунок 19 - Номограмма для определения параметров регулирования
Из номограммы, приведённой на рисунке 19, находим ![]() ,
, ![]() .
.
Так как ![]() , то
, то ![]() или получаем
или получаем ![]() с-1.
с-1.
Следовательно получаем, что ![]() может быть выбран в следующих пределах
может быть выбран в следующих пределах
![]() с-1.
с-1.
![]()
![]()
Построим желаемую ЛАЧХ, а также ЛАЧХ корректирующего устройства.
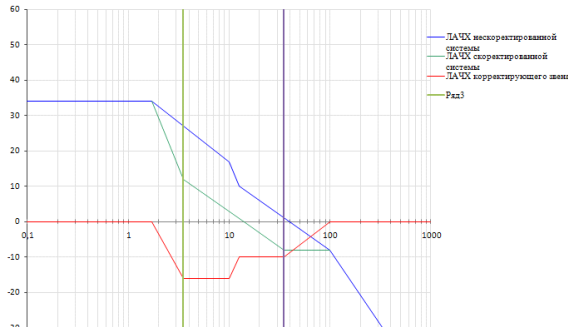
Рисунок 20 - Графики ЛАЧХ, скорректированной ЛАЧХ и ЛАЧХ корректирующего устройства
Выделим частоты сопряжения:
![]() с-1,
с-1, ![]() с-1,
с-1, ![]() с-1,
с-1, ![]() с-1,
с-1, ![]() с-1,
с-1,![]() с-1.
с-1.
По этим частотам составим передаточную функцию регулирующего звена:
10. Оценка качества процесса регулирования скорректированной системы
Произведем повторное построение характеристики h(t) при использовании регулирующего звена:
При помощи моделирующей системы Mathcad найдем передаточную функцию замкнутой САР по задающему воздействию:
 .
.
Получим:
 .
.
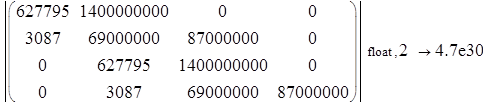
С помощью MatLab найдем корни скорректированной системы:
![]() ,
,
![]() ,
,
![]() .
.
Нанесём корни на комплексную плоскость.
Все корни являются левыми, то есть <0. Однако, исходя из этого, нельзя считать систему устойчивой, так как критерий Ляпунова является необходимым, но не достаточным. Для определения устойчивости системы воспользуемся критерием устойчивости Гурвица.
Критерий устойчивости Гурвица формулируется следующим образом: система автоматического управления n-го порядка будет устойчива, если все коэффициенты характеристического уравнения больше 0, а также главный определитель Гурвица больше 0 и дополнительные определители Гурвица больше 0.
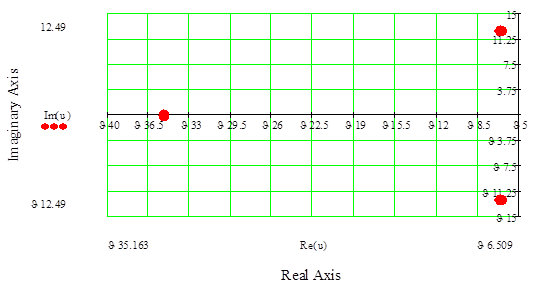
Рисунок 21 - Корни характеристического уравнения САР
![]() .
.
Главный определитель:
Дополнительные определители:

![]()
Так как главный и дополнительные определители Гурвица имеют положительный знак, то система устойчива по критерию Гурвица.
Степень устойчивости САР равна минимальному значению модуля вещественной части всех корней:
![]() .
.
Показатель колебательности САР можно определить как отношение модуля мнимой части корней, образующих максимальный угол между лучами, проведёнными через них из начала координат, к вещественной:
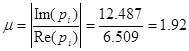 .
.
Другие стьтьи в тему
Разработка программы кодирования по алгоритму Хемминга
В процессе работы электронных устройств осуществляется преобразование
информации. С точки зрения логики функционирования электронных устройств можно
выделить следующие информационные процессы: получение, передачу, обработку,
представление информации, выработку управляющих воздействий. ...
Разработка системы управления акустической системы 5.1 на микроконтроллере AVR
Микропроцессоры
и производные от них - микроконтроллеры - являются широко распространенным и
при этом незаметным элементом инфраструктуры современного общества, основанного
на электронике и коммуникациях. Исследования, проведенные в 2008 году, показали,
что в каждом доме незаметно дл ...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации