Tech Elements
Радиоэлектроника и телекоммуникации
Теоретические сведения
Основными характеристиками, определяющими возможность использования радиолокатора по назначению, являются обеспечение надежного обнаружения различных объектов, измерение их координат и оценка их свойств.
Для радиолокаторов существенным является требование обеспечения достаточной энергии сигнала для обнаружения целей с малыми эффективными площадями рассеяния на максимальной дальности. Поэтому для практики важна, кроме того, возможность реализации приемника, который достаточно хорошо аппроксимирует идеальный приемник с согласованным фильтром. Согласно известному уравнению дальности радиолокационного наблюдения
 , (1)
, (1)
дальность действия РЛС пропорциональна корню четвертой степени от излучаемой мощности. Вследствие этого увеличение мощности передатчика может стоить очень дорого.
Очень важно, кроме того, чтобы генерирование сигналов большой мощности осуществлялось эффективно.
Необходимо рассчитать требуемую мощность передатчика для цели с минимальным поперечником рассеяния. В данном случае цель - рубка подводной лодки, минимальный поперечник рассеяния которой равен ![]() .
.
Радиолокационное наблюдение целей возможно, если мощность сигнала цели на входе приемника Pпр превышает некоторый пороговый уровень Pпр min. Максимальная дальность до цели Rmax, при которой еще выполняется условие Pпр ≥ Pпр min, называется дальностью радиолокационного наблюдения.
Максимальная дальность действия задается тактическими требованиями и зависит от многих технических характеристик РЛС, условий распространения радиоволн и характеристик целей, которые в реальных условиях использования станций подвержены случайным изменениям. Поэтому максимальная дальность действия является вероятностной характеристикой.
Максимальная дальность действия РЛС определяется формулой (1).
В импульсных РЛС для приема и передачи обычно используется одна и та же антенна, т.е. в формуле (1) ![]() . Тогда уравнение дальности радиолокации может быть записано в виде:
. Тогда уравнение дальности радиолокации может быть записано в виде:
 . (2)
. (2)
Если прием сигналов производится на фоне флуктуационной помехи, а приемник является оптимальным, то минимальное отношение «сигнал/шум» (отношение энергии сигнала в импульсе к спектральной плотности шума) ![]() , при котором обеспечивается обнаружение сигнала цели на фоне шумов с заданным качеством ( с заданной вероятностью правильного обнаружения при допустимой вероятности ложной тревоги) или заданная точность оценки параметров сигнала, связано с Pпр min соотношением
, при котором обеспечивается обнаружение сигнала цели на фоне шумов с заданным качеством ( с заданной вероятностью правильного обнаружения при допустимой вероятности ложной тревоги) или заданная точность оценки параметров сигнала, связано с Pпр min соотношением
 ,
,
Где τи - длительность зондирующего импульса, т. е.
 , (4)
, (4)
здесь N0 - спектральная плотность шума на входе приемника.
Учитывая, что ![]() есть энергия излучаемого зондирующего импульса, получим:
есть энергия излучаемого зондирующего импульса, получим:
 . (5)
. (5)
Отсюда следует, что дальность радиолокационного наблюдения определяется отношением энергии зондирующего сигнала к спектральной плотности шума, приведенной к входу приемника РЛС. Спектральную плотность шума можно выразить через эффективную шумовую температуру Tш:
N0 = k ·Tш,
где k = 1,38·10-23 Вт/Гц·град - постоянная Больцмана.
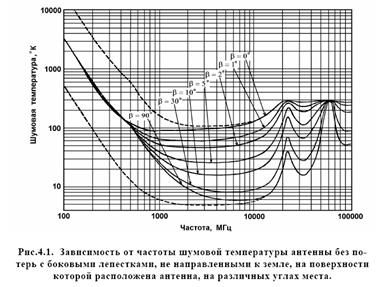
Эффективная шумовая температура складывается из шумовой температуры антенны Tш.А и шумовой температуры приемного тракта
Tш.пр, т. е. Тш = Тш.А + Тш.пр.
Шумовая температура приемного тракта, с учетом потерь в антенном фидере:
 ,(6)
,(6)
где Nш - коэффициент шума приемника, а ηф - коэффициент полезного действия фидерной системы.
Таким образом, эквивалентная спектральная плотность шума, приведенная к входу приемника:
 . (7)
. (7)
Отношение «сигнал-шум», при котором обеспечивается обнаружение сигнала на фоне шумов с вероятностью правильного обнаружения PD и ложной тревоги PF, в случае обнаружения пачки n одинаковых некогерентных нефлуктуирующих импульсов на фоне флуктуирующих помех, определяется:
 . (8)
. (8)
Другие стьтьи в тему
Расчет настроек типовых регуляторов в одноконтурной автоматической системе реагирования
автоматический
Цель
работы:
Определить
настроечные параметры (настройки) типового (ПИ, ПИД, ПД) регулятора в
одноконтурной АСР, обеспечивающие минимум интегрального квадратичного критерия
I0 при заданном ограничении запаса устойчивости m≥mзад.
Выбрать
промышленный регулят ...
Разработка схемы приоритетов прерываний
Для обеспечения перехода от одной программы к другой в
мультипрограммной ЭВМ вводится так называемый режим прерывания программ.
Прерывание программы - способность процессора прекращать выполнение текущей
программы и её управление при возникновении определенных условий. Сигналы,
вызы ...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации