Tech Elements
Радиоэлектроника и телекоммуникации
Устройство и работа блока
Сигналы Р1-РЗ с ДПК поступают на ФИС. ФИС выдаёт импульсы счёта на PC при переходе от одного интервала 1 к другому, т.е. когда код в ДПК меняется с 111 на 000 или с 000 на 111.
Работа ФИС описывается следующими логическими уровнями.
где Sф1 -короткий импульс, сформированный по фронту импульса Р1Р2РЗ,
Sф2 - короткий импульс, сформированный по фронту импульса Р1-Р2-РЗ
ИНП указывает направление перемещения штока (ротора) датчика. При изменении штока в ДПК с 111 на 000, т.е. при прямом перемещении штока (ротора) датчика, состояние ИНП соответствует логической "1".
При изменении кода в ДПК с 000 на 111, т.е. при обратном перемещении штока (ротора) датчика, состоянии ИНП соответствует логическому "0".
Пересчёт импульсов с ФИС осуществляет PC. Причём в зависимости от сигнала с ИНП (логическая "1" или логический "0") PC работает в режиме сложения, либо в режиме вычитания.
Сигналы с выхода ДПК и PC (выходной код) поступает на вход СФКР. СФКР представляет собой схему сложения по модулю2. Контрольный разряд (КР) равен "1" при чётном количестве "1" в выходном коде и равен "0" при нечётном количестве "1" в выходном коде.
УПД обеспечивает питание датчика стабильным током синусоидальной формы и включает в свой состав генератор напряжения синусоидальной формы и преобразователь напряжение-ток.
Генератор синусоидального напряжения состоит из ГНЧ, 8 - разрядного ЦАП и ФНЧ.
ФСИ предназначен для формирования последовательности импульсов синхронизации (СИ), которая обеспечивает общей синхронизации от УПД датчика и блок.
ФИСИ формирует импульс сопровождения информации (ИСИ). ИСИ определяет момент времени, когда можно считывать выходное слово с выходных шин блока.
Шток (ротор) датчика в процессе измерения перемещения осуществляет угловое перемещение. Выходной код блока (Y) то возрастает, то убывает. На рис. 4.3 приведена величина кода Y во время измерения перемещения. На участке 1 показано изменение величины Y при вращении ротора (штока) датчика без переполнения счётчика.
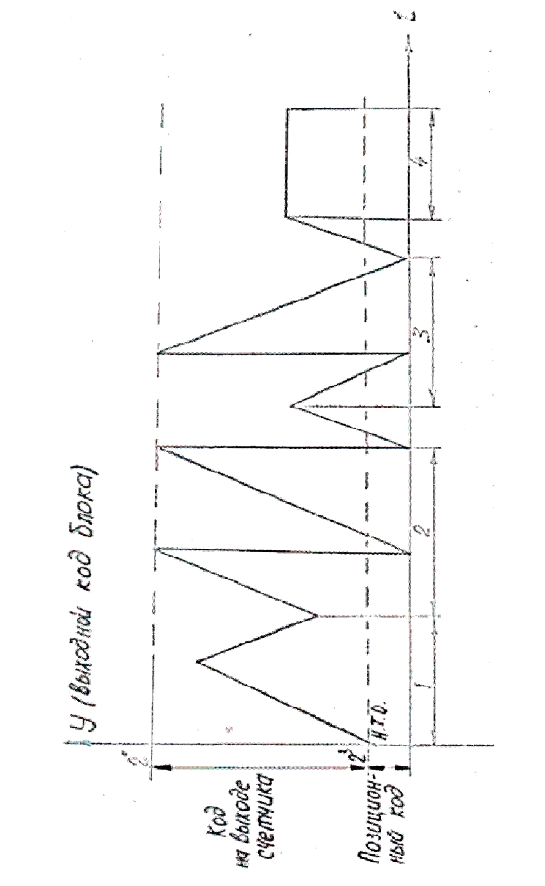
Рисунок 4.3
Участок 2 иллюстрирует изменение величины Y при перемещении штока (ротора) датчика в сторону положительных перемещений с двумя переполнениями счётчика. На участке 3 показано изменение величины Y при перемещении ротора (штока) датчика в сторону отрицательных значений перемещений с переполнением счётчика. На участке 4 произошёл останов ротора (штока) датчика.
Внутри участка 1, 2, 3, величина Y возрастает и убывает с дискретностью единицы младшего разряда выходного кода.
За начальную точку отсчёта принимается значение 3-х младших разрядов выходного кода (позиционный код) после подачи напряжения питания и сигнала СБРОС на блок.
Сигнал СБРОС подаётся нулевым уровнем.
На выход ВФУ поступает позиционный код с выхода ДПК, 8-разрядный код с выхода PC, ИСИ, КР, ИНП, ВФУ обеспечивает согласование уровней выходных сигналов блока с регистрирующей аппаратурой.
БП обеспечивает необходимыми питающими напряжениями блока. В его состав входят ПСН, РТ, ДПН, ВН1, ВН2, КСН1, КСН2.
Другие стьтьи в тему
Расчет цифровой системы импульсно–фазового управления
Электрическая
энергия вырабатывается на электрических станциях и передаётся потребителю
главным образом в виде переменного трёхфазного тока промышленной частоты 50 Гц,
однако как в промышленности, так и на транспорте имеются установки, для питания
которых переменный ток с частотой 50 ...
Расчет и исследование динамики непрерывных и цифровых систем регулирования
Управление
- это процесс формирования и реализации управляющих воздействий, направленных
на достижение некоторой цели. Такой целью может быть поддержание некоторой
физической величины на заданном уровне, изменение некоторого параметра по
определенному алгоритму, получение желаемого в ...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации