Tech Elements
Радиоэлектроника и телекоммуникации
Динамические погрешности растровых датчиков
Существенное влияние на точность преобразования оказывают методы обработки информационных сигналов с растровых трансформаторных преобразователей перемещений. Для оценки возможностей получения высоких метрологических показателей необходимо определить основные источники динамических погрешностей при использовании амплитудно-логического метода обработки сигналов.
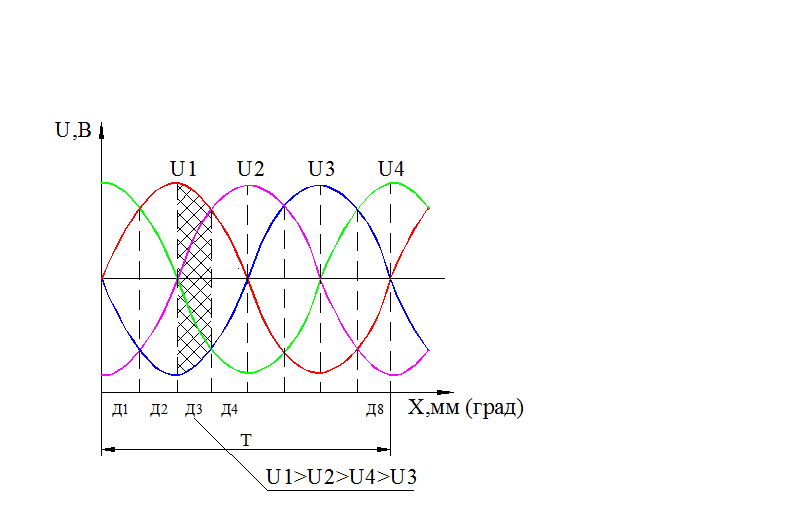
Рисунок 7.7 - Выходные сигналы с растрового датчика
На рисунке 7.7 представлены выходные сигналы с растрового трансформаторного преобразователя перемещений.
При четырёх считывающих обмотках ![]() число квантов шкалы на один период преобразования N=8 (Д1¸Д8). В общем случае
число квантов шкалы на один период преобразования N=8 (Д1¸Д8). В общем случае
=2n. (7.19)
Чтобы опознать каждый из восьми квантов за один период изменения огибающих выходных сигналов, необходимо произвести не менее 8 опросов, т.е.
≥8fд,
где ![]() - частота тока питания;
- частота тока питания;
![]() - частота дискретизации.
- частота дискретизации.
Допустим, что вал растрового датчика вращается с угловой скоростью ![]() , тогда угол поворота входного вала датчика
, тогда угол поворота входного вала датчика ![]() равен
равен
![]() , (7.20)
, (7.20)
где ![]() - время поворота входного вала растрового датчика.
- время поворота входного вала растрового датчика.
Угол поворота входного вала датчика на один период преобразования![]() согласно принципу работы и выражению (4.18)
согласно принципу работы и выражению (4.18)
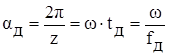 , (7.21)
, (7.21)
где z - количество зубьев ротора;
![]() - время поворота входного вала на один период (на один зуб), тогда
- время поворота входного вала на один период (на один зуб), тогда
![]() . (7.22)
. (7.22)
Из (3.20) следует, что
![]() >
>![]() . (7.23)
. (7.23)
Суммарная погрешность преобразователя нормируется как половина цены деления кванта шкалы, что даёт возможность предполагать, что реальный квант может быть вдвое меньше расчётного. Это приводит к необходимости удвоить частоту опроса, тогда из (7.23) получим окончательно:
![]() >2,54
>2,54![]() . (7.24)
. (7.24)
В выходном сигнале датчика содержится генераторная ЭДС, которая обусловлена влиянием скорости измеряемого перемещения. Эта ЭДС является шумом по отношению к информационной составляющей сигнала. Она формирует динамическую погрешность растрового датчика.
Для её оценки представим потокосцепление одной измерительной обмотки датчика в виде:
![]() , (7.25)
, (7.25)
где W2 - число витков измерительной обмотки;
F(t) - магнитодвижущая сила;
![]() - магнитная проводимость рабочего зазора.
- магнитная проводимость рабочего зазора.
В дальнейшем для анализа приняты следующие допущения:
магнитное сопротивление магнитопроводов значительно меньше сопротивления рабочих воздушных зазоров ![]() <<R;
<<R;
вихревые токи в магнитопроводе не учитываются;
взаимное влияние полюсов друг на друга отсутствует;
магнитная проводимость рабочего зазора модулируется по синусоидальному закону.
Другие стьтьи в тему
Разработка проекта сети доступа по технологии GPON микрорайона №5 г. Минусинска
Тенденция развития телекоммуникационной сети начала ХХI века должна
отвечать времени, то есть быть высокоорганизованной, интеллектуальной,
автоматизированной, соответствовать техническому уровню высокоразвитых стран
мира, обеспечивать передачу разнообразных сообщений и предоставление
...
Разработка структурной схемы местоопределения
1. Метод
определения местоположения - угломерно-разностно-дальномерный.
. Координаты
приемных позиций по оси X
:a
, км=-25в , км=25
. Координаты
приемных позиций по оси Y :
Ya
, км=0
. Пеленг
из точки А на источник излучения : Θao=45
.
...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации