Tech Elements
Радиоэлектроника и телекоммуникации
Динамические погрешности растровых датчиков
Используя закон электромагнитной индукции, из выражения (7.25) найдём значение для выходного сигнала растрового датчика:
 . (7.26)
. (7.26)
Питание разработанных растровых преобразователей осуществляется стабилизированным током. Питание от генератора тока применено с целью устранения влияния температурных колебаний. Все обмотки возбуждения соединены последовательно-согласно. Генератор тока формирует ток:
![]() , (7.27)
, (7.27)
где ![]() - максимальное значение тока.
- максимальное значение тока.
Магнитную проводимость рабочего зазора для полюсного деления представим в виде:
![]() . (7.27)
. (7.27)
Магнитодвижущую силу полюсной секции с учётом (7.27) выразим следующим образом:
 , (7.28)
, (7.28)
где ![]() - число витков обмотки возбуждения.
- число витков обмотки возбуждения.
После дифференцирования выражений (7.27) и (7.28) согласно уравнению (4.24) с учётом равенства (4.18) получим выражение для выходного сигнала:
 .
.
Анализ этого выражения показывает, что выходной сигнал состоит из трёх составляющих: ![]() ,
,
где ![]() - постоянная составляющая для
- постоянная составляющая для ![]()
![]() - трансформаторная ЭДС, являющаяся информационным сигналом;
- трансформаторная ЭДС, являющаяся информационным сигналом;
![]() - генераторная ЭДС, амплитуда которой пропорциональна скорости вращения вала.
- генераторная ЭДС, амплитуда которой пропорциональна скорости вращения вала.
Генераторная ЭДС является источником динамической погрешности. Она сдвигает фазу выходного сигнала. Для оценки этого сдвига представим
 . (7.29)
. (7.29)
Несложно показать, что при этом
 , (7.30)
, (7.30)
 . (7.31)
. (7.31)
Учитывая (7.29), (7.30) и (7.31), получаем:
 (7.32)
(7.32)
Генераторная ЭДС сдвигает все выходные сигналы на одинаковый фазовый угол, следовательно, все границы смены кодов также смещаются одинаково, что не может уменьшить величину кванта шкалы и, следовательно, не может повлиять на точность обработки сигналов в электронном блоке.
Абсолютное значение динамической погрешности для одного периода:
![]() . (7.33)
. (7.33)
Отнеся это значение к угловому размеру кванта шкалы, получим выражение для относительной динамической погрешности растрового датчика:
 , (7.34)
, (7.34)
где n - число считывающих обмоток датчика.
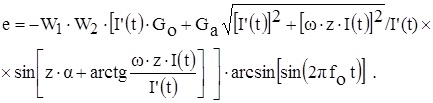
Окончательное выражение динамической погрешности для растрового датчика угловых перемещений с учётом (7.26) выразим следующим образом:
![]() (7.35)
(7.35)
Для растрового трансформаторного датчика линейных перемещений выражение (7.35) будет иметь следующий вид:
![]() , (7.38)
, (7.38)
где Q - шаг винтовой канавки штока.
Выражения (7.35) и (7.36) дают возможность оценить связь между конструктивными, схемными и метрологическими показателями.
Анализ выражения (7.33) позволяет заметить, что при ![]() =0 динамическая погрешность от генераторной ЭДС отсутствует, что используется при построении схемы обработки, в которой опрос сигналов со считывающих обмоток осуществляется в моменты прохождения тока возбуждения через нуль.
=0 динамическая погрешность от генераторной ЭДС отсутствует, что используется при построении схемы обработки, в которой опрос сигналов со считывающих обмоток осуществляется в моменты прохождения тока возбуждения через нуль.
Другие стьтьи в тему
Радиоприемные устройства персонального вызова (пейджер)
Основу
любого пейджера составляет радиоприемник, настроенный на частоту
"радиостанции" пейджинговой компании, в которой он обслуживается.
Приемник
осуществляет основную функцию пейджера - прием сообщений от нужной компании.
Разные пейджинговые компании могут работать в р ...
Разработка специализированного цифрового функционального узла
Разработать
генератор чисел, формирующий при поступлении на его вход каждых N
входных импульсов синхронизации, в зависимости от задаваемого управляющим
сигналом режима, на выходах Z1
и Z2 одну
из двух последовательностей значений сигналов, приведенных в табл. 1.
Таблица
1.
...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации