Tech Elements
Радиоэлектроника и телекоммуникации
Разработка оптико-электронного пеленгатора с фокальным матричным приёмником излучения
Решение:
1. Исследование зависимости вероятности обнаружения малоразмерной цели оптико-электронным пеленгатором по критерию максимального правдоподобия от размера пятна рассеяния объектива при равновероятном положении пятна на пространственном периоде МПИ и значении пикового отношения сигнала к шуму ![]() ;
;
Для каждого i-го кадра отношение сигнал/шум после оптимальной фильтрации определяется выражением:
 ,
,
где ![]() периоды расположения чувствительных элементов в матричном ПИ;
периоды расположения чувствительных элементов в матричном ПИ;
![]() ,
,
где ![]() - функция рассеяния оптической системы,
- функция рассеяния оптической системы, ![]() - пространственный импульсный отклик чувствительных элементов ПИ.
- пространственный импульсный отклик чувствительных элементов ПИ.
Свертку этих двух функций осуществим, используя теорему моментов, согласно которой, функция ![]() определяется следующим выражением:
определяется следующим выражением:
![]() ,
,
Где
![]() ,
, ![]() ,
, ![]() .
.
В нашем случае функция рассеяния оптической системы:
![]() .
.
Пространственный импульсный отклик чувствительных элементов ПИ:
![]()
Очевидно, что А1= А2=1. Таким образом А=1.
Для функции рассеяния ОС:
![]()
![]()
Для пространственного импульсного отклика чувствительных элементов ПИ:
 .
.
Тогда
![]()
Таким образом, получим:
Тогда получим отношение сигнал/шум после оптимальной фильтрации:
Условная вероятность правильного обнаружения определяется по формуле:
Где
По критерию максимума правдоподобия пороговое отношение правдоподобия ![]() .
.
Тогда
![]()
Таким образом, условная вероятность правильного обнаружения:
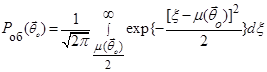 ,
,
Где

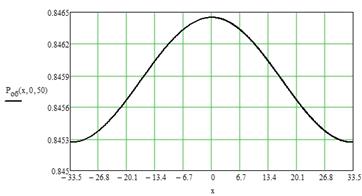
Рис. 2. График зависимости условной вероятности правильного обнаружения цели от координат цели ![]()
электронный пеленгатор матричный излучение
Безусловную вероятность правильного обнаружения в зависимости от пятна рассеяния объектива определяется как среднее значение вероятности правильного обнаружения при равновероятном положении пятна рассеяния на периоде расположения чувствительных элементов:
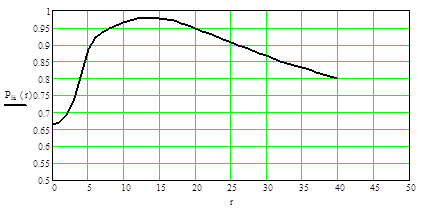
Рис. 3. График зависимости безусловной вероятности правильного обнаружения цели от относительного размера пятна рассеяния ОС
По графику определяем, что максимальная вероятность обнаружения точечного объекта Робн=0,962 достигается при радиусе кружка рассеяния r=23,2 мкм.
Другие стьтьи в тему
Разработка комплекта конструкторских документов на стабилизатор напряжения
При проектировании, ремонте, производстве, эксплуатации, испытаниях
электронных и электротехнических узлов электротехнического оборудования
используется техническая документация, которая называется конструкторской. Для
облегчения проектирования и разработки конструкторской документаци ...
Разработка и изготовление лабораторного стенда по изучению вольтамперных характеристик полупроводниковых диодов
Целью данной работы является разработка и
создание прибора, предназначенного для изучения полупроводниковых диодов. Для
исследования нами был выбран полупроводниковый диод, который наиболее
характерно отражает почти все особенности и свойства полупроводниковой техники
в целом и являе ...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации