Tech Elements
Радиоэлектроника и телекоммуникации
Примеры моделирования в Proteus для исходных сообщений
Сформируем код Хемминга для исходных данных:
1) для исходного сообщения ![]() получим:
получим:
перенос информационных бит в необходимые позиции: ![]()
формирование контрольных бит:
![]() ,
,
![]() ,
,
![]() .
.
Добавив контрольные биты, получим код Хемминга: ![]()
Таким образом, для сообщения ![]() сформирован код Хемминга
сформирован код Хемминга ![]()
Произведем проверку расчетов с результатами вычислений в интегрированной среде Proteus на базе микроконтроллера ATmega128 (рисунок 2).
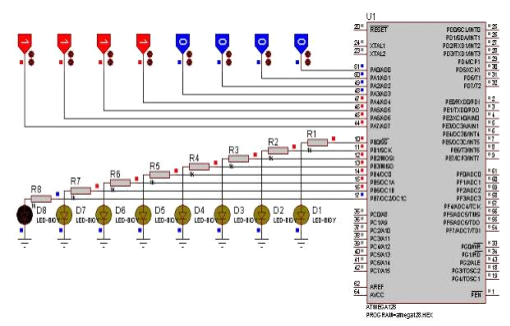
Рисунок 2 - Преобразование исходного сообщения ![]() в код Хемминга
в код Хемминга
Проверка дала аналогичные результаты.
2) для исходного сообщения ![]() получим:
получим:
перенос информационных бит в необходимые позиции: ![]()
формирование контрольных бит:
![]() ,
,
![]() ,
,
![]() .
.
Добавив контрольные биты, получим код Хемминга: ![]()
Таким образом, для сообщения ![]() сформирован код Хемминга
сформирован код Хемминга ![]()
Произведем проверку расчетов с результатами вычислений в интегрированной среде Proteus на базе микроконтроллера ATmega128 (рисунок 3).
Рисунок 3 - Преобразование исходного сообщения ![]() в код Хемминга
в код Хемминга
Проверка дала аналогичные результаты.
Заключение
В результате выполнения курсовой работы были изучены принципы построения корректирующего кода Хемминга, разработана программа преобразования исходных сообщений с помощью кода Хемминга на языке Ассемблер, выполнено моделирование выполнения кода на базе микроконтроллера ATmega128 с помощью программы Proteus.
Эффективность использования того или иного кода во многом определяется знанием характера ошибок в используемом канале передачи. При несоответствии характеристик реального канала и модели, примененной при построении кода, резко снижается эффективность его использования. Применение корректирующих кодов не гарантирует безошибочности приема переданной информации, повышается лишь вероятность получения достоверной информации.
Код Хэмминга используется в некоторых прикладных программах в области хранения данных, особенно в RAID2, кроме того, метод Хэмминга давно применяется в памяти типа ECC позволяет «на лету» исправлять однократные и обнаруживать двукратные ошибки.
Другие стьтьи в тему
Расчет настроек типовых регуляторов в одноконтурной автоматической системе реагирования
автоматический
Цель
работы:
Определить
настроечные параметры (настройки) типового (ПИ, ПИД, ПД) регулятора в
одноконтурной АСР, обеспечивающие минимум интегрального квадратичного критерия
I0 при заданном ограничении запаса устойчивости m≥mзад.
Выбрать
промышленный регулят ...
Расчет дальности действия радиолокационной станции в различных условиях помеховой обстановки
Параметры
РЛС
№
вар Тип сигнала кВт
град
градD
4
КФМ
200
30
5
180
...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации