Tech Elements
Радиоэлектроника и телекоммуникации
Построить амплитудно-частотную характеристику скорректированной замкнутой системы. Определить показатель колебательности. Оценить соответствие полученных показателей качества системы их заданным зна
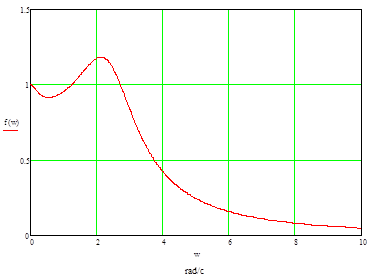
Рисунок 11. АЧХ системы с ПИД регулятором.
μ=Аmax/A0=1,18/1=1,18.
Система удовлетворяет заданным параметрам.
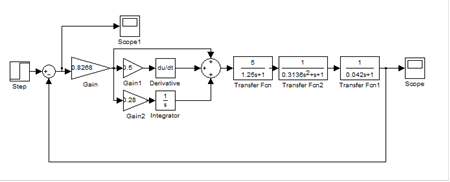
Рисунок 12. Структурная схема системы.
ЗАКЛЮЧЕНИЕ
Передо мной была поставлена задача: синтезировать ПИД регулятор (или последовательное корректирующее устройство) такое, что оно обеспечивало бы, для замкнутой системы, следующие показатели точности и качества управления:
|
С0, % |
σ, % |
TР |
|
0 |
20 |
4.5 с |
В результате выполнения работы, мне удалось подобрать параметры ПИД- регулятора, эмпирическим методом настройки Зиглера-Никольса. Входе дальнейшего анализа системы с ПИД- регулятором, было выяснено, что система удовлетворяет заданным параметрам.
|
С0, %σ, %TР | ||
|
0 |
7,6 |
2,3 с |
А также, имеет приемлемые запасы устойчивости:
По амплитуде 19,9дб.
По фазе 50,4 градусов.
И коэффициент колебательности μ= 1,18.
.
Другие стьтьи в тему
Разработка системы подводного гидроакустического позиционирования нефтедобывающего комплекса
В
последние годы большим спросом стали пользоваться подводные работы с
использованием систем подводного гидроакустического позиционирования (ГСП).
Данные системы широко применяются при поиске углеводородов, находящихся на
морском дне, укладке подводных трубопроводов, обследовании под ...
Расчет настроек типовых регуляторов в одноконтурной автоматической системе реагирования
автоматический
Цель
работы:
Определить
настроечные параметры (настройки) типового (ПИ, ПИД, ПД) регулятора в
одноконтурной АСР, обеспечивающие минимум интегрального квадратичного критерия
I0 при заданном ограничении запаса устойчивости m≥mзад.
Выбрать
промышленный регулят ...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации