Tech Elements
Радиоэлектроника и телекоммуникации
Датчик
В электромагнитных датчиках выходное напряжение подвижной катушки, находящейся в поле постоянного магнита, пропорционально производной по времени от магнитного потока. Эта производная, в свою очередь, пропорциональна скорости перемещения катушки относительно закреплённого в корпусе магнита, то есть производной от относительного движения z(t).
Из уравнений (6) и (9), дифференцируя (6), получаем, что виброскорость (скорость перемещения катушки) v равна
![]()
![]() (10)
(10)
Здесь k - масштабный коэффициент. Из уравнения (10) видно, что выходной сигнал датчика пропорционален частоте. Дли имитации частотной зависимости входной сигнал - y(t) - проходит через фильтр верхних частот (ФВЧ) 1-го порядка с характеристикой Баттерворта (крутизна 20 дБ/декаду). Частота дискретизации, естественно, такая же как и в имитаторе.

Рис.5. Передняя панель датчик.vi.
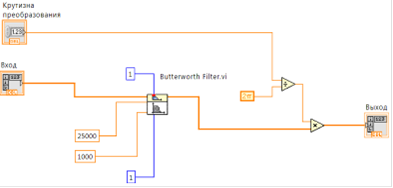
Рис.6. Блок-схема датчик.vi.
Другие стьтьи в тему
Разработка измерительного преобразователя1
Курсовой
проект по предмету «Микроэлектроника и микросхемотехника» имеет своей целью
совершенствование навыков и закрепление знаний, полученных в результате
изучения предмета, развитие инженерных знаний. Работа над курсовым проектом
предполагает проработку существующих методов решен ...
Расчет параметров выпрямительно-инверторного преобразователя, выполненного по шестипульсовой мостовой схеме
Трёхфазный мостовой выпрямительно-инверторный преобразователь (ВИП)
питается от сети с номинальным напряжением UС=U1Л и заданными
пределами колебания этого напряжения %UС Известна мощность короткого замыкания SКЗ, характеризующая реактанс связи точки подключения ВИП и
шин бесконечной ...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации