Tech Elements
Радиоэлектроника и телекоммуникации
Техническое описание МПК- 5А
Электромеханизм МПК-5А (рис. 1) предназначен для управления смесителями, распределителями и перекрывными клапанами или кранами в различных системах и является одной из самых ответственных деталей в этих системах. Электромеханизм применяется в различных климатических условиях, включая тропические.
Рис. 1 Внешний вид электромеханизма МПК-5А
· Номинальное напряжение 27 в.
· Потребляемый ток, не более 2,75 а.
· Противодействующий момент на выходном валу 2,5 кгм.
· Примечание: Выходной вал электромеханизма не допускает осевых нагрузок.
· Момент срабатывания пружинного устройства (муфты ограничения момента), приведенный к выходному валу, 3,54-5 кгм.
· Угол поворота выходного вала, ограниченный внешними жесткими упорами, 30°-180°. .ч
· Время поворота выходного вала на рабочий угол 180° 43 сек.±20%.
· Напряжение трогания на холостом ходу, не более 16В.
· Режим работы - повторно-кратковременный, состоящий:
а. Правое вращение выходного вала на угол 90°, перерыв 30 сек., левое вращение выходного вала на угол 90°, перерыв 1 мин., таких циклов 5, после чего перерыв не менее 30 мин.
б. Реверсивные импульсные включения в количестве до 20 включений за один летный час. Продолжительность каждого включения 1 сек.
· Электромеханизм должен безотказно работать в следующих условиях:
а. В диапазоне рабочего напряжения от 24,3 до 29,7 в;
б. при относительной влажности окружающей среды до 100% при температуре до +40°С;
в. при изменении температур окружающей среды от +120 до -60°С и кратковременно (в течение 10 мин. за один летный час) при предельно допустимой температуре + 150°С;
г. при циклических изменениях температур от +150 до -60°С;
д. при атмосферном давлении до 18,6 мм рт. ст.;
е. при воздействии инея, росы, пыли и морского тумана.
· В условиях механических воздействии электромеханизм:
а. виброустойчив в диапазоне частот 10-300гц с ускорением до 5 g;
б. вибропрочен в диапазоне частот 20-300гц с ускорением до 5 g;
в. устойчив к воздействию линейных ускорении до 10 g;
г. выдерживает транспортирование с ускорением до 15 g и длительности импульса 5-10 мсек.;
д. ударопрочен при ускорении до 15 g при длительности импульса 20 - 50 мсек. Общее число ударов 10000;
е. не должен вступать в резонанс в диапазоне частот 5-40гц с амплитудой 0,5-0,8 мм;
ж. устойчив к воздействию ударов с ускорением до 15 g при длительности импульса 20-50 мсек.
· Электромеханизм должен быть взрывобезопасным.
· Вес электромеханизма не более 1,8 кг.
Гарантии
Предприятие гарантирует безотказную работу изделия в соответствии с гарантией, предусмотренной техническими условиями и указанной в паспорте па данное изделие.
Принцип действия
При подаче питания ток будет поступать через клеммы штепсельного разъема, нормально замкнутые контакты выключателя на одну из обмоток возбуждения, обмотки якоря и на минус.
Вращательное движение вала электродвигателя передается через понижающий редуктор, состоящий из восьми ступеней зубчатых передач, выходному валу механизма.
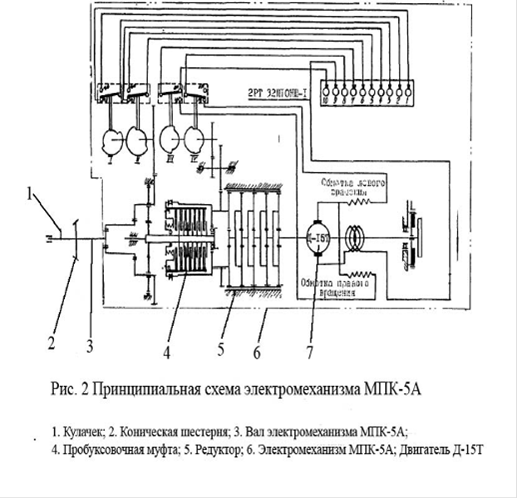
Электромеханизм работает только на жестких упорах, устанавливаемых на объекте. При встрече с упором или когда нагрузка на выходном валу достигает величины 3,5 кгм, последний останавливается, и вращение от электродвигателя передастся через корончатое зубчатое колесо (рис. 2) на каретку пружинного устройства.
Нажимное устройство, перемещаясь вместе с кареткой, размыкает контакты концевых выключателей, через которые подается питание электродвигателю. Электродвигатель обесточивается.
Конструкция
Электромеханизм состоит из следующих основных узлов:
· электродвигателя постоянного тока Д-15Т;
· редуктора;
· пружинного устройства (муфты ограничения момента);
· двух концевых выключателей;
· штепсельного разъема 2РТ 32ПТ ОНШ 1.
Электродвигатель
Д-15Т - электродвигатель постоянного тока с последовательным возбуждением, закрытого исполнения, рассчитан для питания от двухпроводной сети.
Реверсирование электродвигателя осуществляется путем изменения полярности полюсов. Для этой цели в электродвигателе имеются две самостоятельные обмотки возбуждения включаемые раздельно в зависимости от направления вращения.
Другие стьтьи в тему
Разработка автоматизированного рабочего места помощника бухгалтера ООО Торговый дом Алдан
рабочий место автоматизированный информационный
Развитие
экономики и других сфер человеческой деятельности в наше время связано с
применением вычислительной техники, созданием информационных систем различного
назначения. Сегодня обработка экономической информации стала само ...
Разработка систем автоматического регулирования с использованием логарифмических частотных характеристик
Целью
данной курсовой работы является освоение методики анализа и синтеза систем
автоматического регулирования с использованием логарифмических частотных
характеристик и уточненных расчетов на ЭВМ.
Проектирование
системы автоматического регулирования (САР) выполняется по заданной
...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации