Tech Elements
Радиоэлектроника и телекоммуникации
Принцип действия системы позиционирования в нефтедобывающем комплексе
Сущность предлагаемого способа поясняется чертежами.
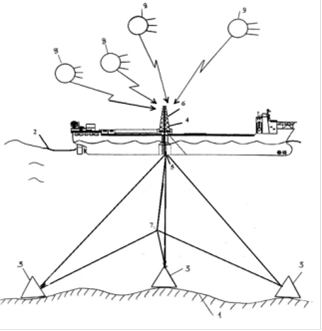
Подводный грунт 1, водная поверхность 2, донные гидроакустические приемоответчики 3, судно с располагающемся на нем приемоответчиком 4 на поверхности 2, снабженный спутниковым связным модулем 6 и гидроакустическим приемоответчиком 5, бур 7, спутники 8 низкоорбитальной системы спутниковой навигации, спутники 9 среднеорбитальной системы спутниковой навигации.
Рисунок 2.1 - Схема формирования навигационной базы.
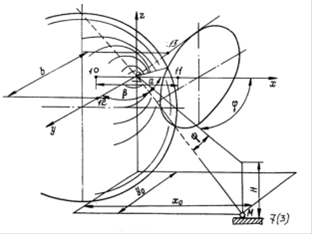
Приемники 10, 11, 12, 13, подводный объект 7 или донный гидроакустический приемоответчик 3.
Рисунок 2.2 - Поверхности положения подводного объекта в гидроакустической системе позиционирования с ультракороткой базой.
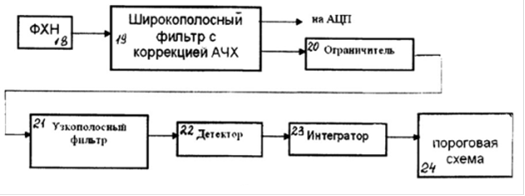
Формирователь характеристики направленности (ФХН) 18, широкополосный фильтр 19 с коррекцией амплитудно-частотной характеристики, ограничитель 20, узкополосный фильтр 21, детектор 22, интегратор 23, пороговую схему 24.
Рисунок 2.3 - Функциональная схема приема сигнала "включение".

Широкополосный фильтр 25 с коррекцией амплитудно-частотной характеристики, ограничитель 26, узкополосный фильтр 27, детектор 28, интегратор 29, узкополосный фильтр 30, детектор 31, интегратор 32, пороговую схему 33, схему выбора максимума 34.
Рисунок 2.4 - Функциональная схема обработки сигналов.
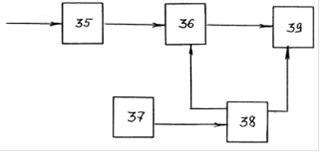
Кодер 35, устройство формирования 36 пакетов сообщений на передачу, устройство формирования 37 алгоритма передачи пакетов сообщений, устройство управления 38 с программой работы передатчика на излучение (3-8 раз/сутки).
Рисунок 2.5 - Спутниковый связной модуль.
Приемоответчик 4 представляет собой устройство, состоящее из полиуретанового корпуса, на котором размещена спутниковая антенна. Внутри корпуса установлена аппаратура измерения, обработки и хранения информации.
Обработка сообщений включает помехоустойчивое кодирование, разбивку каждого сообщения на пакеты с длительностью, зависящей от состояния взволнованной поверхности, передачу пакетов сообщения на ретранслятор по алгоритму, автоматически формируемому в зависимости от морского волнения, которое определяется посредством спутниковой навигационной системы в соответствии с определенными алгоритмами.
Очевидно, что позиционирование маяка-ответчика на морской поверхности не требует проведения относительной и абсолютной калибровок полигона, который необходим при использовании донных гидроакустических маяков-ответчиков, так как наличие у маяка-ответчика GPS приемника позволяет ему «знать» свои географические координаты в реальном масштабе времени с высокой точностью. Позиционирование бура относительно донных приемоответчиков и маяков-ответчиков может осуществляется как в режиме с длинной, ультракороткой базой (ДБ и УКБ), так и в комбинированном режиме ДБ/УКБ.
Бур оснащается соответствующими режиму работ гидроакустическими приемо-передающими антеннами, навигационным контроллером и навигационным программно-математическим обеспечением.
Маяк-ответчик работает в режиме «запрос-ответ» и в режиме «пингер» (маяк). В режиме с длинной базой при определении координат бура решается триангуляционная задача. При этом площадь или протяженность зоны действия системы зависит от энергетической дальности действия гидроакустической связи, глубины расположения подводного объекта, гидрологии, шумов подводного объекта и морской поверхности. При этом в отличие от позиционирования с использованием только донной навигационной базы совместное позиционирование посредством маяков ответчика и донных приемоответчиков существенно расширяет функциональные возможности подводного объекта, дает возможность оперативно оборудовать рабочий полигон любой площади и протяженности, позволяет подводному объекту определять свои координаты в реальном времени, получать данные по своим координатам в любое необходимое время или постоянно в автоматическом режиме.
Другие стьтьи в тему
Радиолокационный уровнемер УРМД 01
В
НИИИС будет разработан радиолокационный уровнемер УРМД-01 5 миллиметрового (мм)
диапазона длин волн для резервуарного парка углеводородного сырья и продуктов
их переработки.
Принцип
работы уровнемера основан на излучении непрерывного ЛЧМ сигнала и измерение
параметров принимаем ...
Расчет и конструирование схемы параллельного регистра на триггере CLD - типа
Одним из основных достижений микроэлектроники является создание на основе
фундаментальных и прикладных наук новой элементной базы - интегральных
микросхем. Развитие вопросов проектирования и совершенствование технологии
позволило в короткий срок создать высокоинтегрированные функциона ...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации