Tech Elements
Радиоэлектроника и телекоммуникации
Измерение зависимости магнитной индукции от расстояния при одинаковой частоте работы катушек индуктивности
Зависимость биений от положения измерительной антенны при удаленности катушек на 10 см указана в таблице 10.
Таблица 10 - Зависимость величины биений от расстояния
|
r, см |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
Величина биений, мкТл |
0,68 |
0,66 |
0,74 |
1,56 |
1,8 |
1,74 |
1,4 |
0,86 |
0,81 |
Как видно из таблицы, максимальные показания биений получены в зоне равноудаленности катушек - на расстоянии 5 см. Сравнивая таблицу 10 с таблицей 7, видно, что биения при повышении частоты уменьшились. Максимальные значения биений уменьшились в 2 раза, а минимальные более чем в 2,5 раза. Верхняя и нижняя огибающие имеют форму параболы. Для обеих огибающих производилась аппроксимация методом наименьших квадратов с помощью полинома степени 2. Для верхней огибающей:= 0,5173x2 - 4,9967x + 18,377
R² = 0,9973
Для нижней огибающей:= 0,5788x2 - 5,6558x + 18,584;
R² = 0,9988.
Величина погрешности аппроксимации для верхней огибающей составила 0,27 %, для нижней огибающей 0,12 %.
Затем катушки были приближены друг к другу и были проведены измерения индукции переменного магнитного поля в условиях парной работы катушек на расстоянии 6 см. Частота генераторов не изменялась и составила 500 Гц. Прибор фиксировал значения на расстоянии от 1 см до 5 см с шагом 1 см. По результатам измерений был построен график, который показан на рисунке 11. Погрешность измерений составила ± 10 % согласно документации прибора.
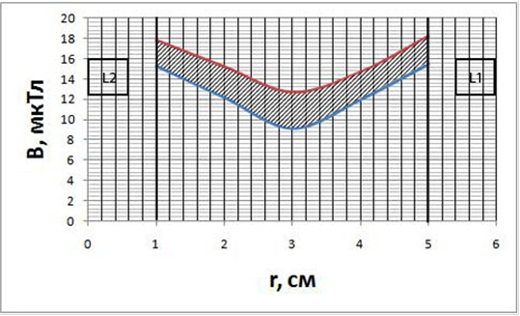
Рисунок 11 - Зависимость магнитной индукции от расстояния при парной работе катушек
Зависимость биений от расположения антенны между катушками индуктивности показана на таблице 11.
Таблица 11 - Зависимость величины биений от расстояния
|
r, см |
1 |
2 |
3 |
4 |
5 |
|
Величина биений, мкТл |
2,48 |
3,01 |
3,58 |
2,70 |
2,69 |
Сравнивая график 11 с графиком 8, видно, что при повышении частоты уменьшился разброс флуктуаций, при этом нижняя огибающая имеет характерную параболическую форму, вследствие чего «провал», который виден на графике 8, отсутствует.
Верхняя и нижняя огибающие имеют форму параболы. Для обеих огибающих производилась аппроксимация методом наименьших квадратов с помощью полинома степени 2. Для верхней огибающей:= 1,1864x2 - 7,0876x + 23,928
R² = 0,9536
Для нижней огибающей:= 1,3671x2 - 8,1829x + 22,334;
R² = 0,936.
Величина погрешности аппроксимации для верхней огибающей составила 5,64 %, для нижней огибающей 7,4 %.
Далее катушки индуктивности располагались на расстоянии 14 см и производились измерения индукции переменного магнитного поля. Частота генераторов не изменялась и составила 500 Гц. Прибор фиксировал значения на расстоянии от 1 см до 13 см с шагом 1 см. По результатам измерений был построен график, который показан на рисунке 12. Погрешность измерений составила ± 10 % согласно документации прибора.
Другие стьтьи в тему
Радиоэлектроника и телекомуникации
Вторичная сеть общего пользования представляет собой
совокупность автоматических телефонных станции (АТС), узлов автоматической
коммутации (УАК), абонентских аппаратов и линий, а также каналов передачи,
полученных из первичной сети. В этой вторичной сети существует иерархия,
подобная ...
Расчет собственных частот ионосферно-магнитосферного альвеновского резонатора (ИМАР) методами теории возмущений
Важным инструментом в индикации ЧС различного типа, таких как извержения
вулканов, землетрясения, промышленные взрывы; космические, наземные и подземные
ядерные взрывы, сигналы от стартов ракет и возникающие при полете ракет с
включенными двигателями является ионосферно-магнитосферный ...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации