Tech Elements
Радиоэлектроника и телекоммуникации
Регулируемый реверсивный тиристорный электропривод постоянного тока
В данном курсовом проекте рассматривается регулируемый электропривод. Регулируемым называется электропривод, который обеспечивает с заданной точностью движение исполнительного органа рабочей машины в соответствии с произвольно изменяющимся входным сигналом управления. Этот сигнал может изменяться в широких пределах по произвольному временному закону и может быть механическим или электрическим. Чаще всего входной сигнал представляет собой скорость или угол поворота оси или вала задающего устройства. Регулируемый электропривод применяется в металлообрабатывающих станках, для привода роботов и манипуляторов, в автоматических измерительных устройствах и во многих других случаях.
На рисунке 1 приведена структурная схема регулируемого электропривода. Регулируемый электропривод состоит из датчиков 1 и 5, входного и выходного сигналов, измерителя рассогласования 2, системы управления 3 и электродвигателя с механической передачей 4, который приводит в движение исполнительный орган 6 рабочей машины.
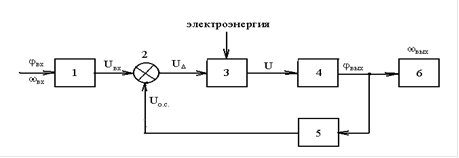
Рисунок 1 - Структурная схема электропривода
Датчики
входной и выходной величин преобразуют механические величины (скорость или угол
поворота вала) в электрические - входной сигнал ![]() и сигнал
обратной связи
и сигнал
обратной связи ![]() . Измеритель рассогласования 2, алгебраически суммируя
эти сигналы, вырабатывает сигнал рассогласования
. Измеритель рассогласования 2, алгебраически суммируя
эти сигналы, вырабатывает сигнал рассогласования ![]() ,
поступающий в систему управления электродвигателем 3. Следящий электропривод по
своей структуре представляет собой замкнутую систему, действующую по принципу
отклонения.
,
поступающий в систему управления электродвигателем 3. Следящий электропривод по
своей структуре представляет собой замкнутую систему, действующую по принципу
отклонения.
Система
управления 3 состоит из регулятора (усилителя) и силового преобразователя,
которые обеспечивают необходимое преобразование сигнала рассогласования ![]() в напряжение
в напряжение ![]() ,
поступающее на двигатель. За счёт выбора схем регулятора и преобразователя или
введения корректирующих устройств обеспечивается необходимый закон изменения
этого напряжения во времени
,
поступающее на двигатель. За счёт выбора схем регулятора и преобразователя или
введения корректирующих устройств обеспечивается необходимый закон изменения
этого напряжения во времени ![]() при
отработке входного воздействия
при
отработке входного воздействия ![]() или
или ![]() .
.
Автоматическое регулирование положения требует измерения углового перемещения рабочего органа механизма и использования устройств, задающих эти перемещения.
Электродвигатель
и механическая передача 4 в соответствии с законом изменения ![]() обеспечивают перемещение исполнительного органа 6.
Иногда двигатель с механической передачей называют исполнительным механизмом
(сервомеханизмом).
обеспечивают перемещение исполнительного органа 6.
Иногда двигатель с механической передачей называют исполнительным механизмом
(сервомеханизмом).
- Классификация электроприводов
- Выбор электродвигателя. Расчет параметров
- Сопротивление двигателя в горячем состоянии
- Выбираем комплектный электропривод типа ЭПУ1М-2-4627МУХЛ4.
- Выбор сглаживающего реактора
- Определение параметров силовой цепи
- Расчет электромеханических характеристик разомкнутой системы преобразователь-двигатель
- Расчет регулировочных характеристик системы СУ-ТП.
- Структурная схема линеаризованной САУ
- Оптимизация контура тока
- Оптимизация контура скорости
- Контур скорости настроен на МО
- Контур скорости настроен на СО
- Расчет статических характеристик электропривода
- Исследование нелинейной САУ
- Отработка нелинейной САУ РЭП UЗС=0,1 В
- Отработка нелинейной САУ РЭП UЗС=5 В
- О отработка нелинейной САУ РЭП UЗС=10 В
Другие стьтьи в тему
Расчет силовых компонентов привода механизма подъемаопускания груза промышленного робота
Эффективность средств производства, которыми располагает
человеческое общество, в значительной степени определяется совершенством
способов получения энергии, необходимой для выполнения механической работы в
производственных процессах. Производственные механиз ...
Радиоэлектроника и телекомуникации
Вторичная сеть общего пользования представляет собой
совокупность автоматических телефонных станции (АТС), узлов автоматической
коммутации (УАК), абонентских аппаратов и линий, а также каналов передачи,
полученных из первичной сети. В этой вторичной сети существует иерархия,
подобная ...
Разделы
- Главная
- Радиоэлектроника и телекомуникации в современном мире
- Разработка проекта системы видеонаблюдения
- Разработка схемы радиовещательного приемника
- Разработка телевизионного приемника
- Разработка цифрового дешифратора
- Производство полупроводниковых приборов
- Развитие технологий передачи данных
- Разработка домашней охранной сигнализации